 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOn the Out-of-Distribution Coverage of Combining Split Conformal Prediction and Bayesian Deep Learning
Nov 21, 2023Bayesian deep learning and conformal prediction are two methods that have been used to convey uncertainty and increase safety in machine learning systems. We focus on combining Bayesian deep learning with split conformal prediction and how this combination effects out-of-distribution coverage; particularly in the case of multiclass image classification. We suggest that if the model is generally underconfident on the calibration set, then the resultant conformal sets may exhibit worse out-of-distribution coverage compared to simple predictive credible sets. Conversely, if the model is overconfident on the calibration set, the use of conformal prediction may improve out-of-distribution coverage. We evaluate prediction sets as a result of combining split conformal methods and neural networks trained with (i) stochastic gradient descent, (ii) deep ensembles, and (iii) mean-field variational inference. Our results suggest that combining Bayesian deep learning models with split conformal prediction can, in some cases, cause unintended consequences such as reducing out-of-distribution coverage.
Towards Reliable Colorectal Cancer Polyps Classification via Vision Based Tactile Sensing and Confidence-Calibrated Neural Networks
Apr 25, 2023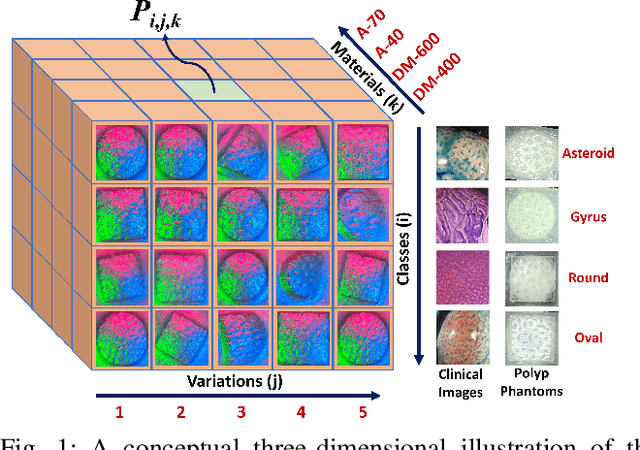
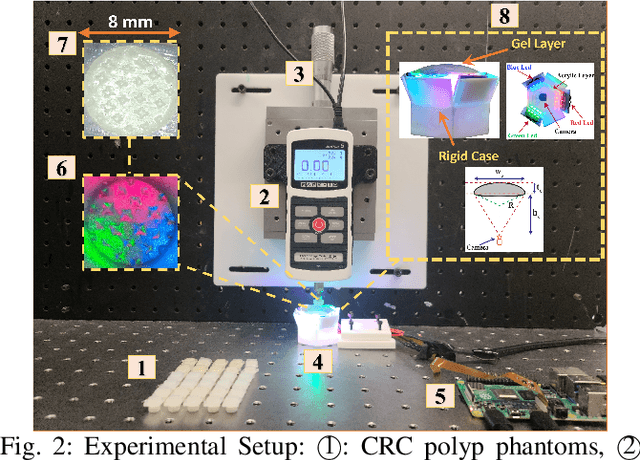
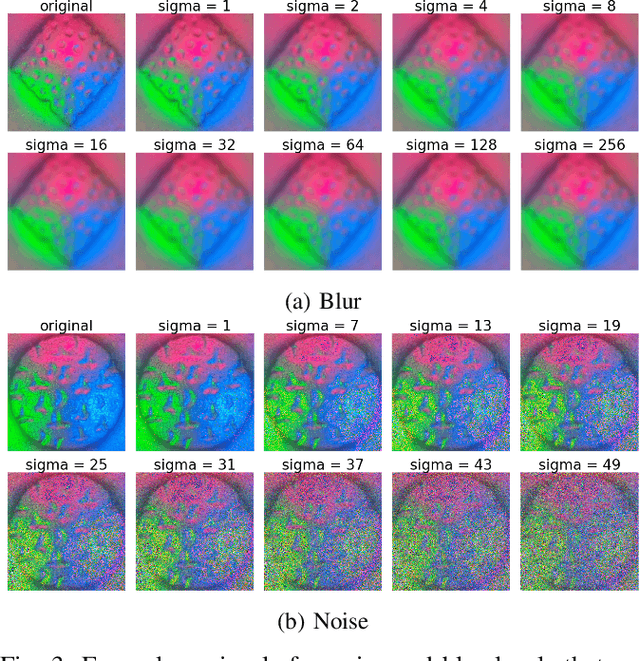
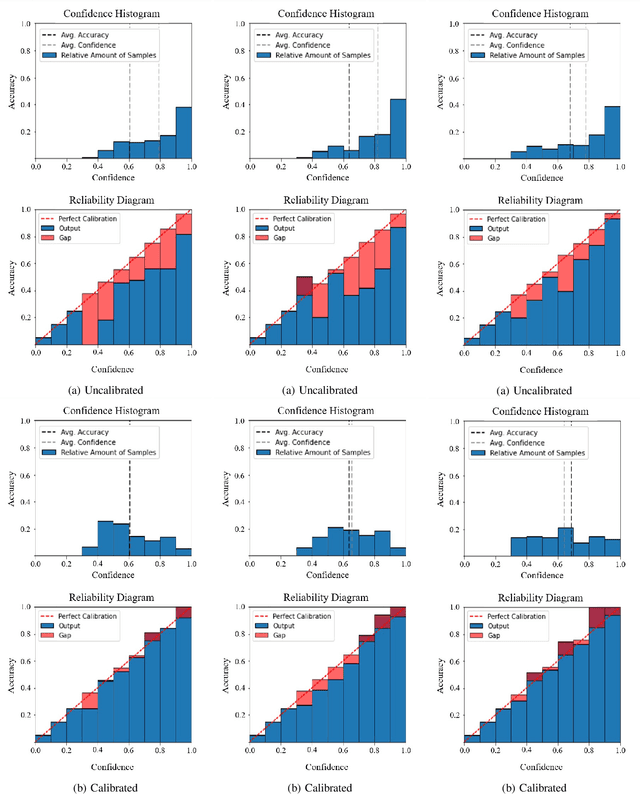
In this study, toward addressing the over-confident outputs of existing artificial intelligence-based colorectal cancer (CRC) polyp classification techniques, we propose a confidence-calibrated residual neural network. Utilizing a novel vision-based tactile sensing (VS-TS) system and unique CRC polyp phantoms, we demonstrate that traditional metrics such as accuracy and precision are not sufficient to encapsulate model performance for handling a sensitive CRC polyp diagnosis. To this end, we develop a residual neural network classifier and address its over-confident outputs for CRC polyps classification via the post-processing method of temperature scaling. To evaluate the proposed method, we introduce noise and blur to the obtained textural images of the VS-TS and test the model's reliability for non-ideal inputs through reliability diagrams and other statistical metrics.
Bodies at Rest: 3D Human Pose and Shape Estimation from a Pressure Image using Synthetic Data
Apr 02, 2020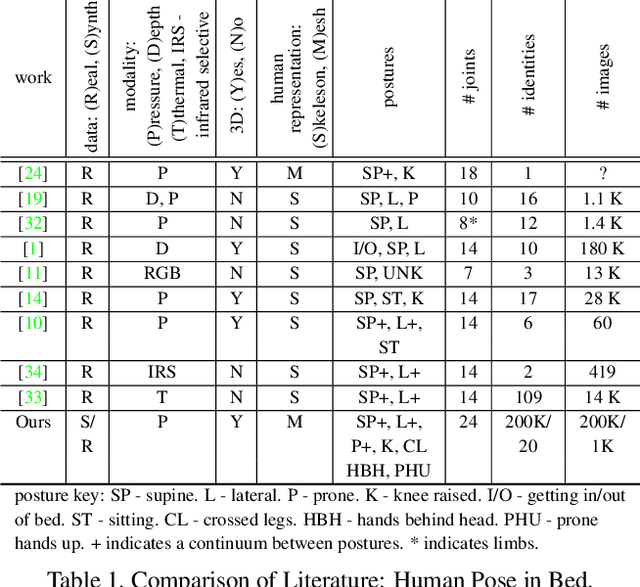
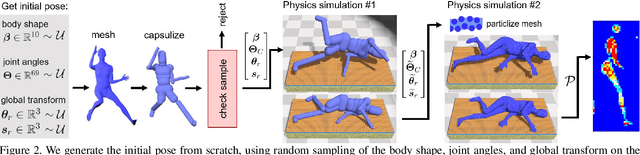
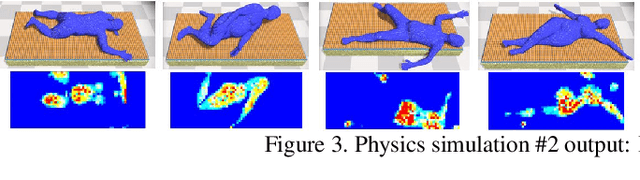
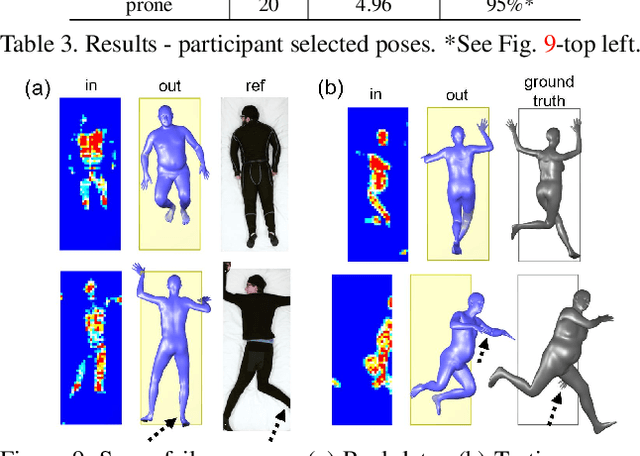
People spend a substantial part of their lives at rest in bed. 3D human pose and shape estimation for this activity would have numerous beneficial applications, yet line-of-sight perception is complicated by occlusion from bedding. Pressure sensing mats are a promising alternative, but training data is challenging to collect at scale. We describe a physics-based method that simulates human bodies at rest in a bed with a pressure sensing mat, and present PressurePose, a synthetic dataset with 206K pressure images with 3D human poses and shapes. We also present PressureNet, a deep learning model that estimates human pose and shape given a pressure image and gender. PressureNet incorporates a pressure map reconstruction (PMR) network that models pressure image generation to promote consistency between estimated 3D body models and pressure image input. In our evaluations, PressureNet performed well with real data from participants in diverse poses, even though it had only been trained with synthetic data. When we ablated the PMR network, performance dropped substantially.
Assistive Gym: A Physics Simulation Framework for Assistive Robotics
Oct 10, 2019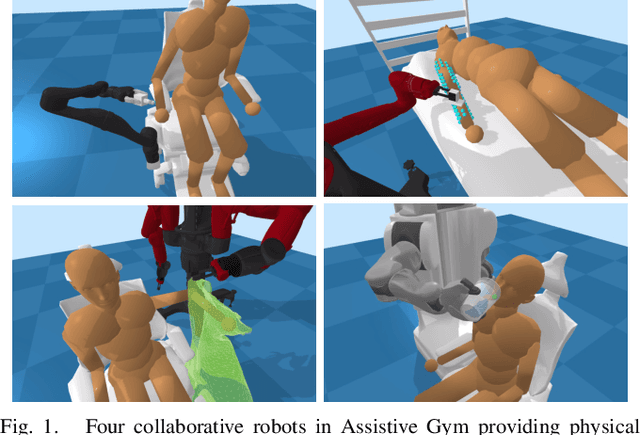
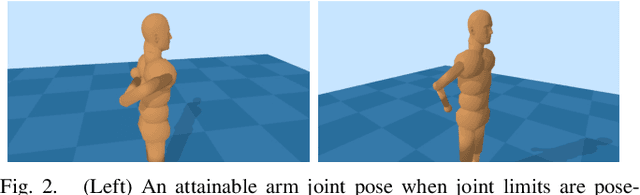
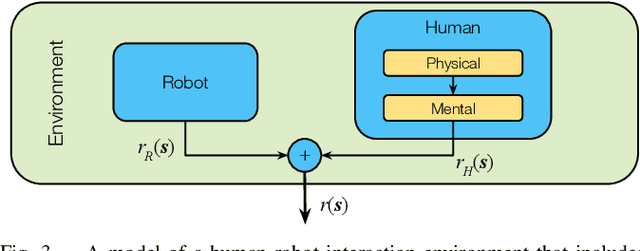
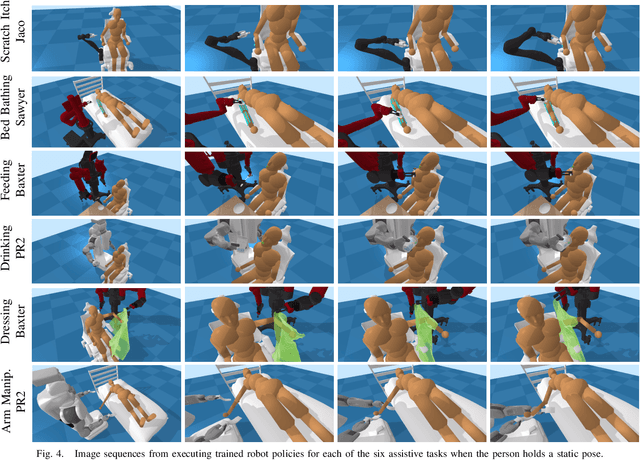
Autonomous robots have the potential to serve as versatile caregivers that improve quality of life for millions of people worldwide. Yet, conducting research in this area presents numerous challenges, including the risks of physical interaction between people and robots. Physics simulations have been used to optimize and train robots for physical assistance, but have typically focused on a single task. In this paper, we present Assistive Gym, an open source physics simulation framework for assistive robots that models multiple tasks. It includes six simulated environments in which a robotic manipulator can attempt to assist a person with activities of daily living (ADLs): itch scratching, drinking, feeding, body manipulation, dressing, and bathing. Assistive Gym models a person's physical capabilities and preferences for assistance, which are used to provide a reward function. We present baseline policies trained using reinforcement learning for four different commercial robots in the six environments. We demonstrate that modeling human motion results in better assistance and we compare the performance of different robots. Overall, we show that Assistive Gym is a promising tool for assistive robotics research.
3D Human Pose Estimation on a Configurable Bed from a Pressure Image
Aug 29, 2018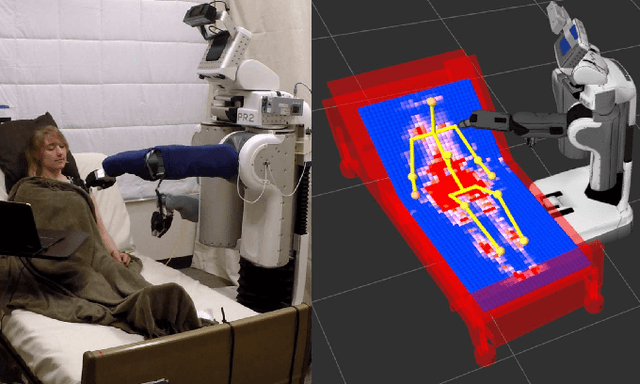
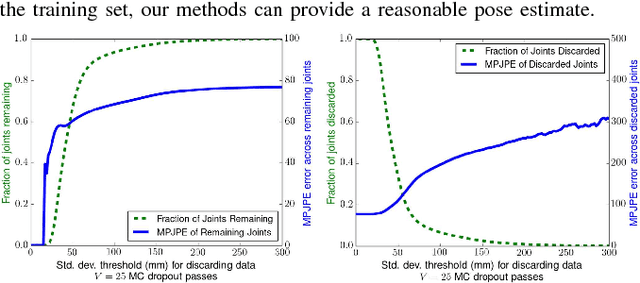
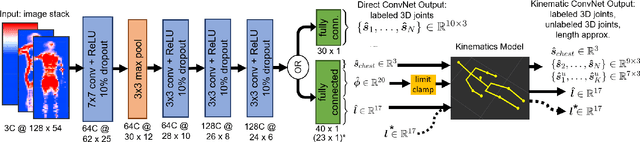
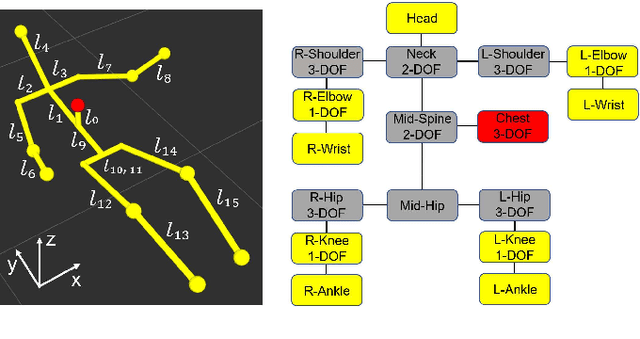
Robots have the potential to assist people in bed, such as in healthcare settings, yet bedding materials like sheets and blankets can make observation of the human body difficult for robots. A pressure-sensing mat on a bed can provide pressure images that are relatively insensitive to bedding materials. However, prior work on estimating human pose from pressure images has been restricted to 2D pose estimates and flat beds. In this work, we present two convolutional neural networks to estimate the 3D joint positions of a person in a configurable bed from a single pressure image. The first network directly outputs 3D joint positions, while the second outputs a kinematic model that includes estimated joint angles and limb lengths. We evaluated our networks on data from 17 human participants with two bed configurations: supine and seated. Our networks achieved a mean joint position error of 77 mm when tested with data from people outside the training set, outperforming several baselines. We also present a simple mechanical model that provides insight into ambiguity associated with limbs raised off of the pressure mat, and demonstrate that Monte Carlo dropout can be used to estimate pose confidence in these situations. Finally, we provide a demonstration in which a mobile manipulator uses our network's estimated kinematic model to reach a location on a person's body in spite of the person being seated in a bed and covered by a blanket.
Task-centric Optimization of Configurations for Assistive Robots
Apr 19, 2018
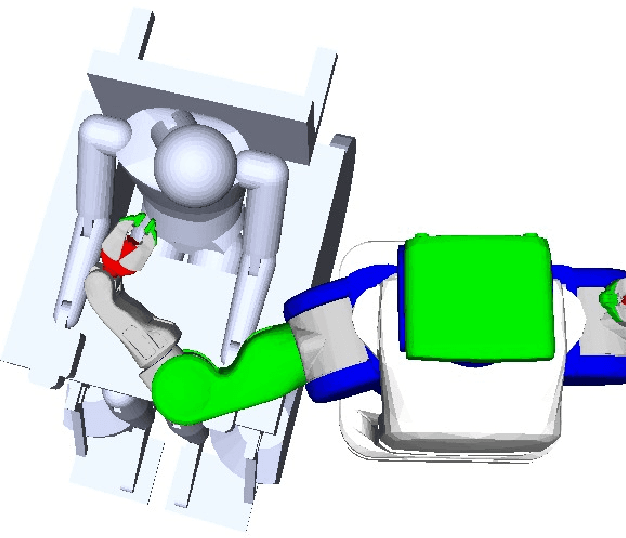
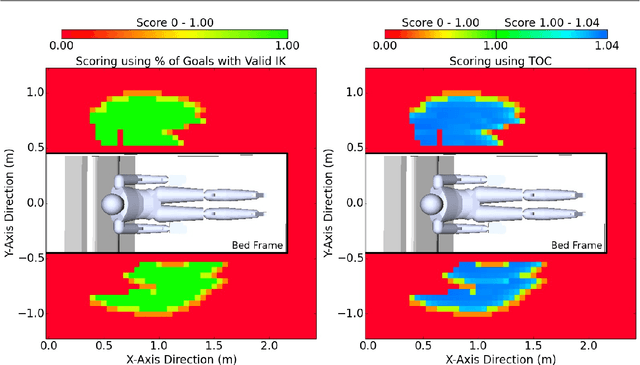
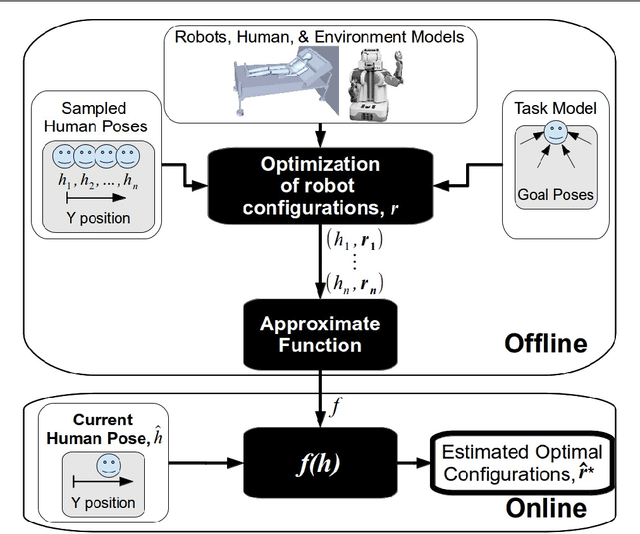
Robots can provide assistance to a human by moving objects to locations around the person's body. With a well chosen initial configuration, a robot can better reach locations important to an assistive task despite model error, pose uncertainty and other sources of variation. However, finding effective configurations can be challenging due to complex geometry, a large number of degrees of freedom, task complexity and other factors. We present task-centric optimization of robot configurations (TOC), which is an algorithm that finds configurations from which the robot can better reach task-relevant locations and handle task variation. Notably, TOC can return more than one configuration that when used sequentially enable a simulated assistive robot to reach more task-relevant locations. TOC performs substantial offline computation to generate a function that can be applied rapidly online to select robot configurations based on current observations. TOC explicitly models the task, environment, and user, and implicitly handles error using representations of robot dexterity. We evaluated TOC in simulation with a PR2 assisting a user with 9 assistive tasks in both a wheelchair and a robotic bed. TOC had an overall average success rate of 90.6\% compared to 50.4\%, 43.5\%, and 58.9\% for three baseline methods from literature. We additionally demonstrate how TOC can find configurations for more than one robot and can be used to assist in designing or optimizing environments.
Tracking Human Pose During Robot-Assisted Dressing using Single-Axis Capacitive Proximity Sensing
Sep 22, 2017
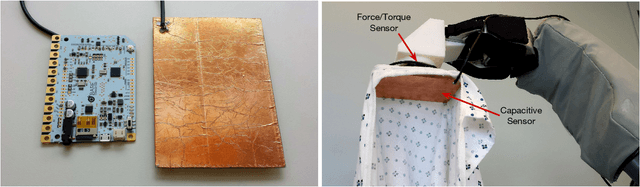
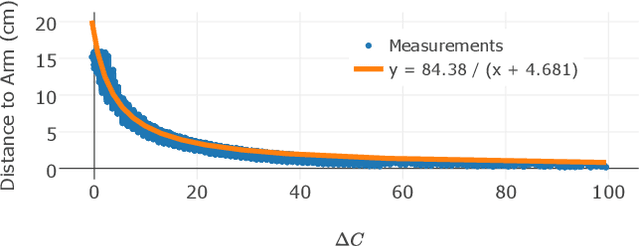

Dressing is a fundamental task of everyday living and robots offer an opportunity to assist people with motor impairments. While several robotic systems have explored robot-assisted dressing, few have considered how a robot can manage errors in human pose estimation, or adapt to human motion in real time during dressing assistance. In addition, estimating pose changes due to human motion can be challenging with vision-based techniques since dressing is often intended to visually occlude the body with clothing. We present a method to track a person's pose in real time using capacitive proximity sensing. This sensing approach gives direct estimates of distance with low latency, has a high signal-to-noise ratio, and has low computational requirements. Using our method, a robot can adjust for errors in the estimated pose of a person and physically follow the contours and movements of the person while providing dressing assistance. As part of an evaluation of our method, the robot successfully pulled the sleeve of a hospital gown and a cardigan onto the right arms of 10 human participants, despite arm motions and large errors in the initially estimated pose of the person's arm. We also show that a capacitive sensor is unaffected by visual occlusion of the body and can sense a person's body through fabric clothing.