 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Smart Handheld Edge Device for On-Site Diagnosis and Classification of Texture and Stiffness of Excised Colorectal Cancer Polyps
Sep 18, 2023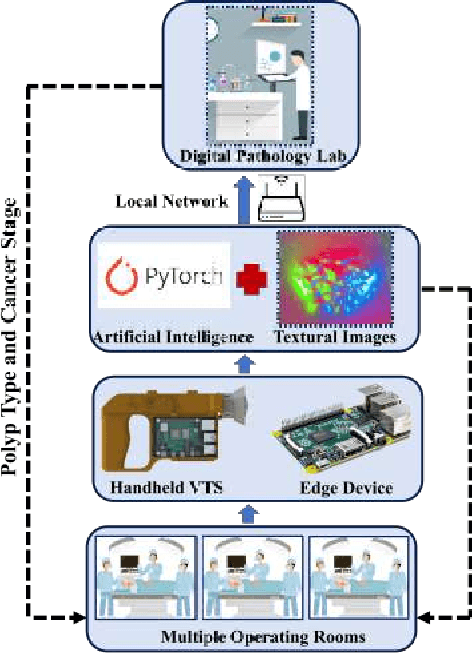
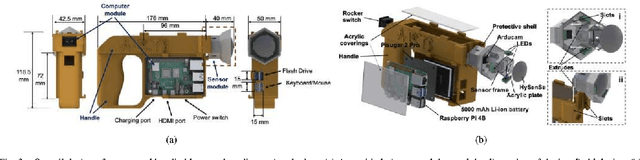
This paper proposes a smart handheld textural sensing medical device with complementary Machine Learning (ML) algorithms to enable on-site Colorectal Cancer (CRC) polyp diagnosis and pathology of excised tumors. The proposed unique handheld edge device benefits from a unique tactile sensing module and a dual-stage machine learning algorithms (composed of a dilated residual network and a t-SNE engine) for polyp type and stiffness characterization. Solely utilizing the occlusion-free, illumination-resilient textural images captured by the proposed tactile sensor, the framework is able to sensitively and reliably identify the type and stage of CRC polyps by classifying their texture and stiffness, respectively. Moreover, the proposed handheld medical edge device benefits from internet connectivity for enabling remote digital pathology (boosting the diagnosis in operating rooms and promoting accessibility and equity in medical diagnosis).
Towards Reliable Colorectal Cancer Polyps Classification via Vision Based Tactile Sensing and Confidence-Calibrated Neural Networks
Apr 25, 2023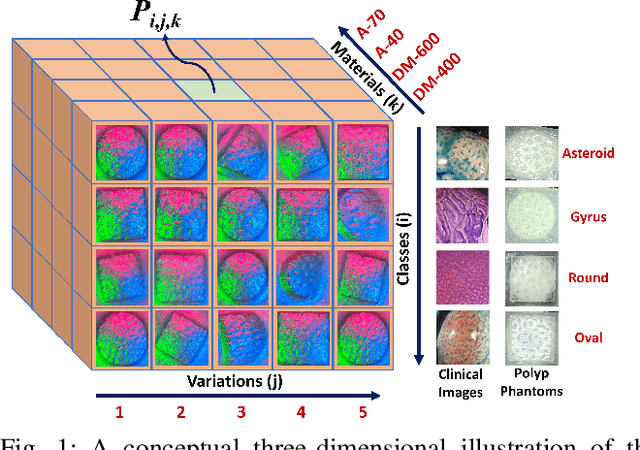
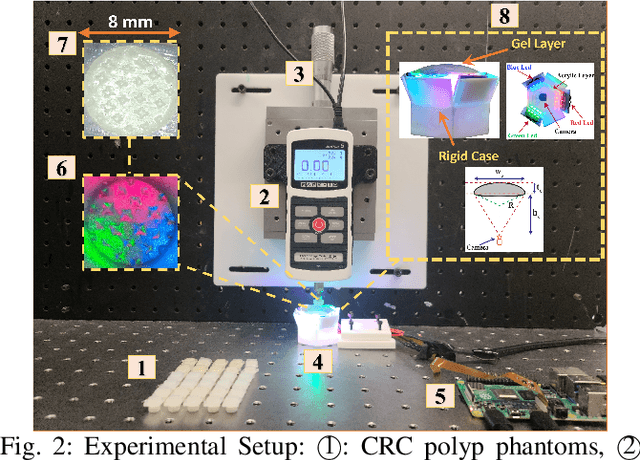
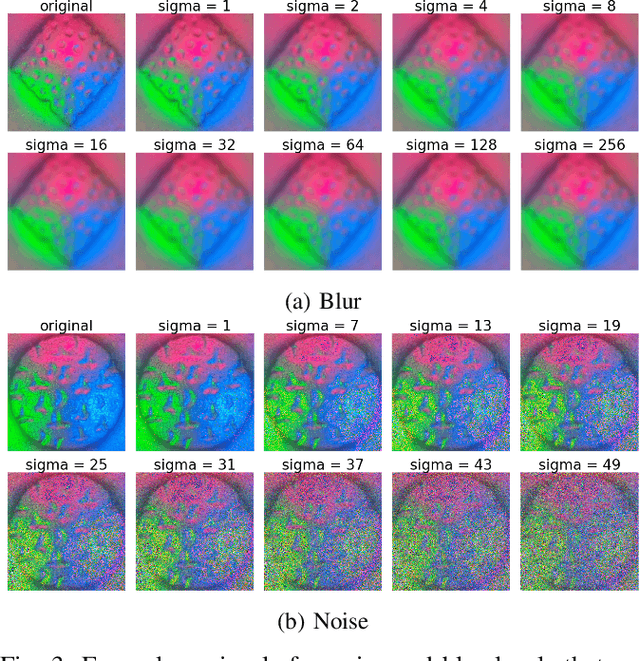
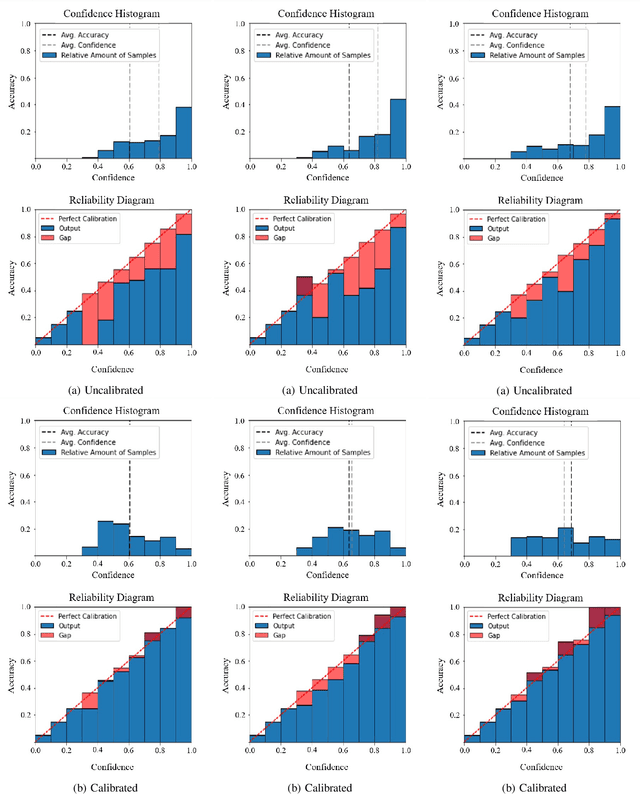
In this study, toward addressing the over-confident outputs of existing artificial intelligence-based colorectal cancer (CRC) polyp classification techniques, we propose a confidence-calibrated residual neural network. Utilizing a novel vision-based tactile sensing (VS-TS) system and unique CRC polyp phantoms, we demonstrate that traditional metrics such as accuracy and precision are not sufficient to encapsulate model performance for handling a sensitive CRC polyp diagnosis. To this end, we develop a residual neural network classifier and address its over-confident outputs for CRC polyps classification via the post-processing method of temperature scaling. To evaluate the proposed method, we introduce noise and blur to the obtained textural images of the VS-TS and test the model's reliability for non-ideal inputs through reliability diagrams and other statistical metrics.
Pit-Pattern Classification of Colorectal Cancer Polyps Using a Hyper Sensitive Vision-Based Tactile Sensor and Dilated Residual Networks
Nov 13, 2022
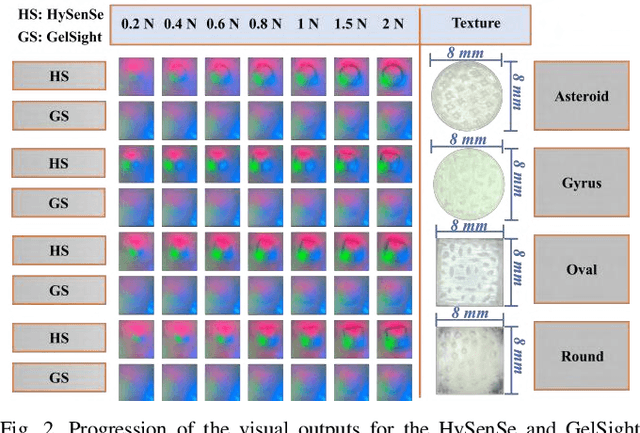
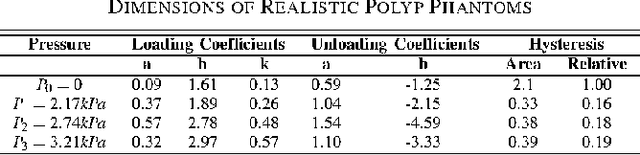
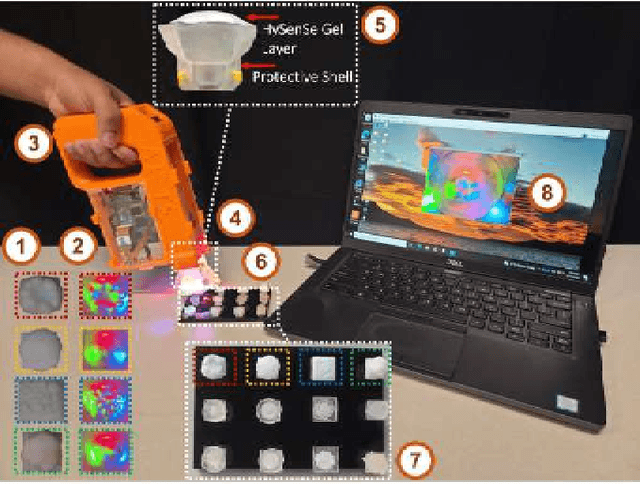
In this study, with the goal of reducing the early detection miss rate of colorectal cancer (CRC) polyps, we propose utilizing a novel hyper-sensitive vision-based tactile sensor called HySenSe and a complementary and novel machine learning (ML) architecture that explores the potentials of utilizing dilated convolutions, the beneficial features of the ResNet architecture, and the transfer learning concept applied on a small dataset with the scale of hundreds of images. The proposed tactile sensor provides high-resolution 3D textural images of CRC polyps that will be used for their accurate classification via the proposed dilated residual network. To collect realistic surface patterns of CRC polyps for training the ML models and evaluating their performance, we first designed and additively manufactured 160 unique realistic polyp phantoms consisting of 4 different hardness. Next, the proposed architecture was compared with the state-of-the-art ML models (e.g., AlexNet and DenseNet) and proved to be superior in terms of performance and complexity.
Classification of Colorectal Cancer Polyps via Transfer Learning and Vision-Based Tactile Sensing
Nov 08, 2022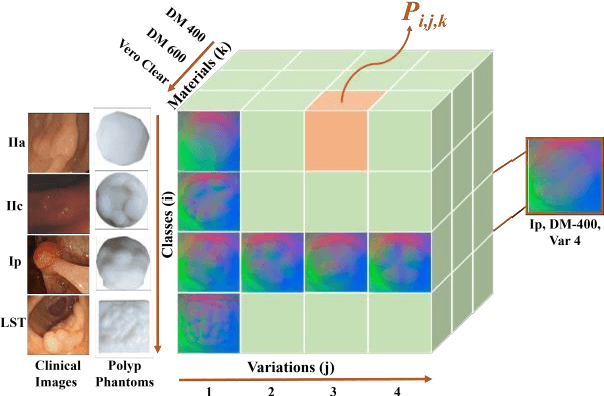
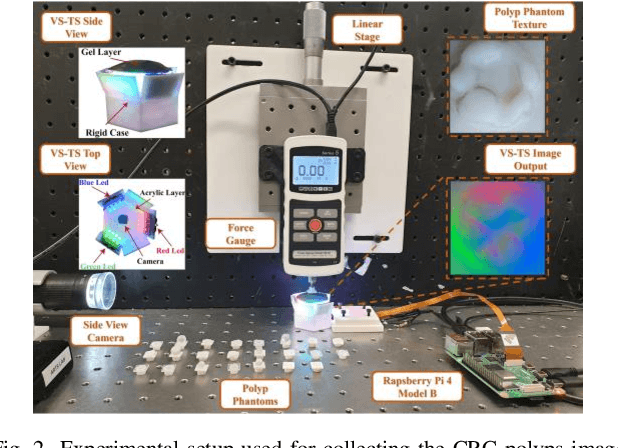
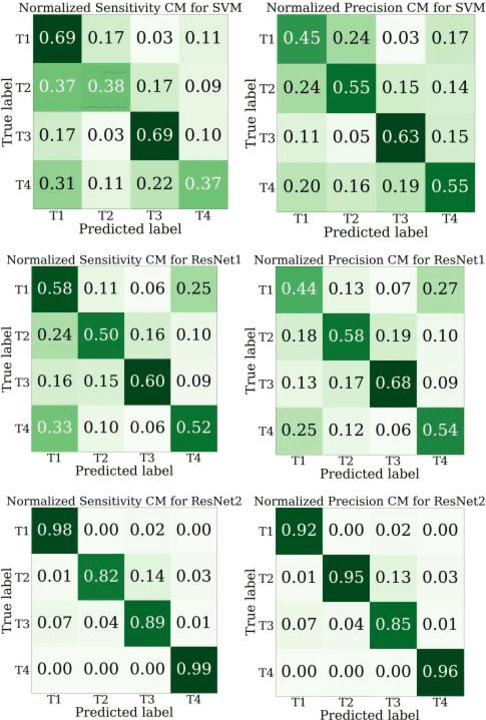
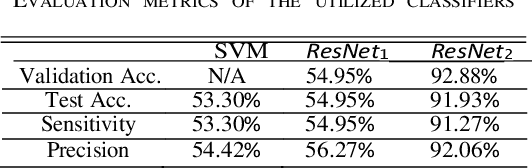
In this study, to address the current high earlydetection miss rate of colorectal cancer (CRC) polyps, we explore the potentials of utilizing transfer learning and machine learning (ML) classifiers to precisely and sensitively classify the type of CRC polyps. Instead of using the common colonoscopic images, we applied three different ML algorithms on the 3D textural image outputs of a unique vision-based surface tactile sensor (VS-TS). To collect realistic textural images of CRC polyps for training the utilized ML classifiers and evaluating their performance, we first designed and additively manufactured 48 types of realistic polyp phantoms with different hardness, type, and textures. Next, the performance of the used three ML algorithms in classifying the type of fabricated polyps was quantitatively evaluated using various statistical metrics.