 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAugmented Bridge Spinal Fixation: A New Concept for Addressing Pedicle Screw Pullout via a Steerable Drilling Robot and Flexible Pedicle Screws
Jul 02, 2025To address the screw loosening and pullout limitations of rigid pedicle screws in spinal fixation procedures, and to leverage our recently developed Concentric Tube Steerable Drilling Robot (CT-SDR) and Flexible Pedicle Screw (FPS), in this paper, we introduce the concept of Augmented Bridge Spinal Fixation (AB-SF). In this concept, two connecting J-shape tunnels are first drilled through pedicles of vertebra using the CT-SDR. Next, two FPSs are passed through this tunnel and bone cement is then injected through the cannulated region of the FPS to form an augmented bridge between two pedicles and reinforce strength of the fixated spine. To experimentally analyze and study the feasibility of AB-SF technique, we first used our robotic system (i.e., a CT-SDR integrated with a robotic arm) to create two different fixation scenarios in which two J-shape tunnels, forming a bridge, were drilled at different depth of a vertebral phantom. Next, we implanted two FPSs within the drilled tunnels and then successfully simulated the bone cement augmentation process.
Robot-Enabled Machine Learning-Based Diagnosis of Gastric Cancer Polyps Using Partial Surface Tactile Imaging
Aug 02, 2024


In this paper, to collectively address the existing limitations on endoscopic diagnosis of Advanced Gastric Cancer (AGC) Tumors, for the first time, we propose (i) utilization and evaluation of our recently developed Vision-based Tactile Sensor (VTS), and (ii) a complementary Machine Learning (ML) algorithm for classifying tumors using their textural features. Leveraging a seven DoF robotic manipulator and unique custom-designed and additively-manufactured realistic AGC tumor phantoms, we demonstrated the advantages of automated data collection using the VTS addressing the problem of data scarcity and biases encountered in traditional ML-based approaches. Our synthetic-data-trained ML model was successfully evaluated and compared with traditional ML models utilizing various statistical metrics even under mixed morphological characteristics and partial sensor contact.
A Patient-Specific Framework for Autonomous Spinal Fixation via a Steerable Drilling Robot
May 27, 2024



In this paper, with the goal of enhancing the minimally invasive spinal fixation procedure in osteoporotic patients, we propose a first-of-its-kind image-guided robotic framework for performing an autonomous and patient-specific procedure using a unique concentric tube steerable drilling robot (CT-SDR). Particularly, leveraging a CT-SDR, we introduce the concept of J-shape drilling based on a pre-operative trajectory planned in CT scan of a patient followed by appropriate calibration, registration, and navigation steps to safely execute this trajectory in real-time using our unique robotic setup. To thoroughly evaluate the performance of our framework, we performed several experiments on two different vertebral phantoms designed based on CT scan of real patients.
Towards Reliable Colorectal Cancer Polyps Classification via Vision Based Tactile Sensing and Confidence-Calibrated Neural Networks
Apr 25, 2023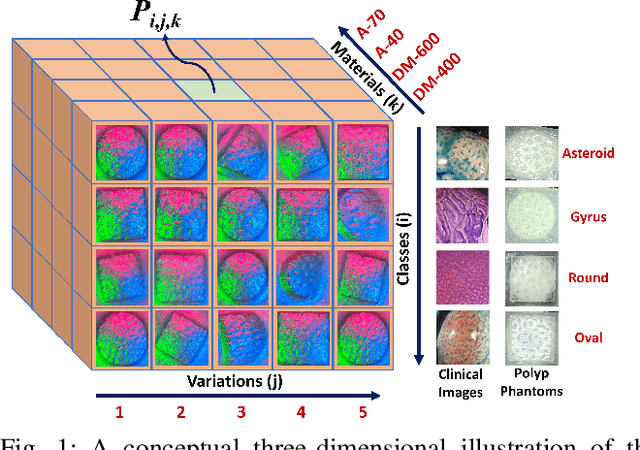
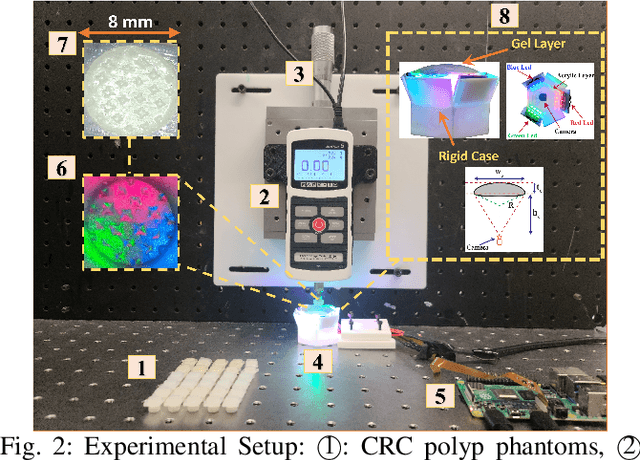
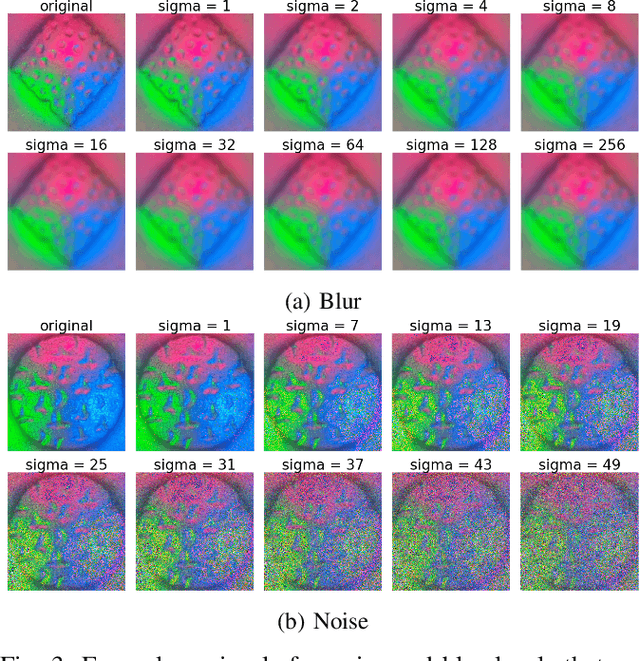
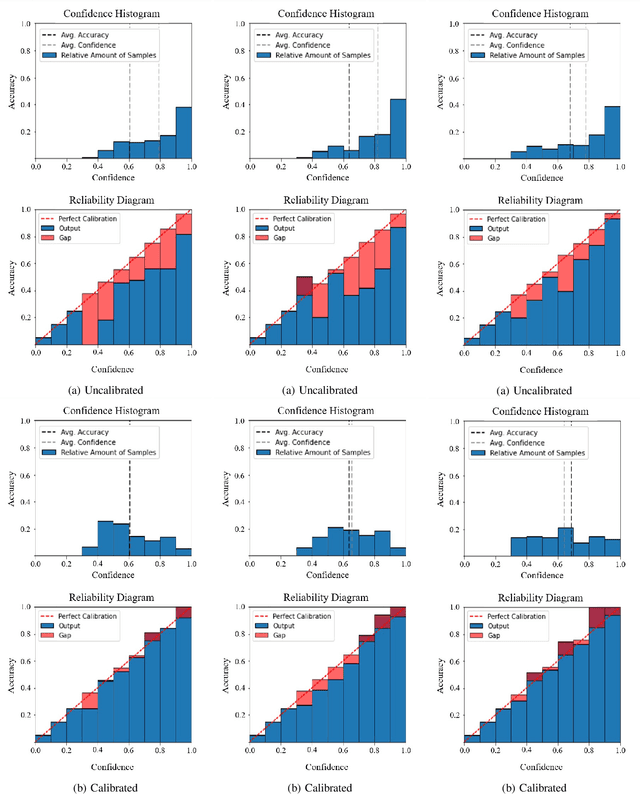
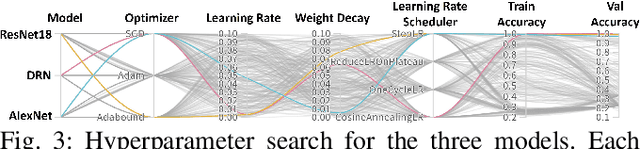
In this study, toward addressing the over-confident outputs of existing artificial intelligence-based colorectal cancer (CRC) polyp classification techniques, we propose a confidence-calibrated residual neural network. Utilizing a novel vision-based tactile sensing (VS-TS) system and unique CRC polyp phantoms, we demonstrate that traditional metrics such as accuracy and precision are not sufficient to encapsulate model performance for handling a sensitive CRC polyp diagnosis. To this end, we develop a residual neural network classifier and address its over-confident outputs for CRC polyps classification via the post-processing method of temperature scaling. To evaluate the proposed method, we introduce noise and blur to the obtained textural images of the VS-TS and test the model's reliability for non-ideal inputs through reliability diagrams and other statistical metrics.