 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards Design and Development of a Concentric Tube Steerable Drilling Robot for Creating S-shape Tunnels for Pelvic Fixation Procedures
Jul 02, 2025Current pelvic fixation techniques rely on rigid drilling tools, which inherently constrain the placement of rigid medical screws in the complex anatomy of pelvis. These constraints prevent medical screws from following anatomically optimal pathways and force clinicians to fixate screws in linear trajectories. This suboptimal approach, combined with the unnatural placement of the excessively long screws, lead to complications such as screw misplacement, extended surgery times, and increased radiation exposure due to repeated X-ray images taken ensure to safety of procedure. To address these challenges, in this paper, we present the design and development of a unique 4 degree-of-freedom (DoF) pelvic concentric tube steerable drilling robot (pelvic CT-SDR). The pelvic CT-SDR is capable of creating long S-shaped drilling trajectories that follow the natural curvatures of the pelvic anatomy. The performance of the pelvic CT-SDR was thoroughly evaluated through several S-shape drilling experiments in simulated bone phantoms.
Towards an Autonomous Minimally Invasive Spinal Fixation Surgery Using a Concentric Tube Steerable Drilling Robot
May 29, 2024



Towards performing a realistic autonomous minimally invasive spinal fixation procedure, in this paper, we introduce a unique robotic drilling system utilizing a concentric tube steerable drilling robot (CT-SDR) integrated with a seven degree-of-freedom robotic manipulator. The CT-SDR in integration with the robotic arm enables creating precise J-shape trajectories enabling access to the areas within the vertebral body that currently are not accessible utilizing existing rigid instruments. To ensure safety and accuracy of the autonomous drilling procedure, we also performed required calibration procedures. The performance of the proposed robotic system and the calibration steps were thoroughly evaluated by performing various drilling experiments on simulated Sawbone samples.
Spatial Spinal Fixation: A Transformative Approach Using a Unique Robot-Assisted Steerable Drilling System and Flexible Pedicle Screw
May 27, 2024



Spinal fixation procedures are currently limited by the rigidity of the existing instruments and pedicle screws leading to fixation failures and rigid pedicle screw pull out. Leveraging our recently developed Concentric Tube Steerable Drilling Robot (CT-SDR) in integration with a robotic manipulator, to address the aforementioned issue, here we introduce the transformative concept of Spatial Spinal Fixation (SSF) using a unique Flexible Pedicle Screw (FPS). The proposed SSF procedure enables planar and out-of-plane placement of the FPS throughout the full volume of the vertebral body. In other words, not only does our fixation system provide the option of drilling in-plane and out-of-plane trajectories, it also enables implanting the FPS inside linear (represented by an I-shape) and/or non-linear (represented by J-shape) trajectories. To thoroughly evaluate the functionality of our proposed robotic system and the SSF procedure, we have performed various experiments by drilling different I-J and J-J drilling trajectory pairs into our custom-designed L3 vertebral phantoms and analyzed the accuracy of the procedure using various metrics.
A Patient-Specific Framework for Autonomous Spinal Fixation via a Steerable Drilling Robot
May 27, 2024



In this paper, with the goal of enhancing the minimally invasive spinal fixation procedure in osteoporotic patients, we propose a first-of-its-kind image-guided robotic framework for performing an autonomous and patient-specific procedure using a unique concentric tube steerable drilling robot (CT-SDR). Particularly, leveraging a CT-SDR, we introduce the concept of J-shape drilling based on a pre-operative trajectory planned in CT scan of a patient followed by appropriate calibration, registration, and navigation steps to safely execute this trajectory in real-time using our unique robotic setup. To thoroughly evaluate the performance of our framework, we performed several experiments on two different vertebral phantoms designed based on CT scan of real patients.
Towards Biomechanics-Aware Design of a Steerable Drilling Robot for Spinal Fixation Procedures with Flexible Pedicle Screws
May 24, 2023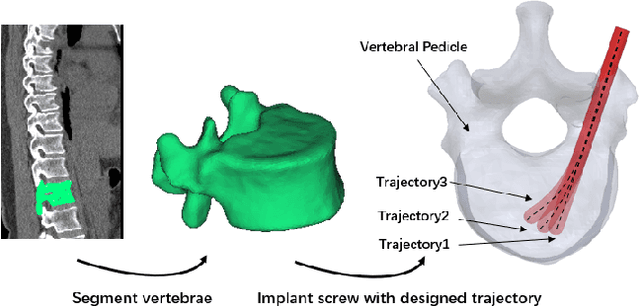
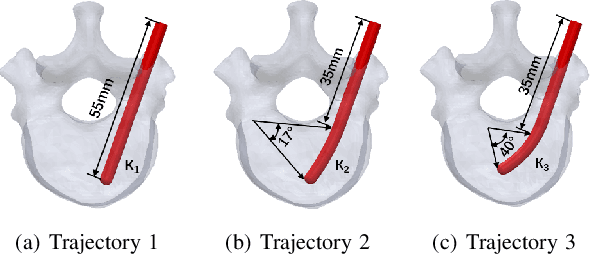
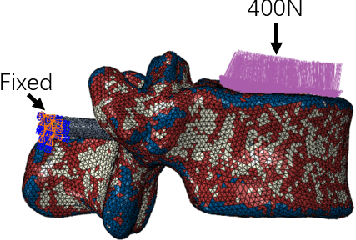
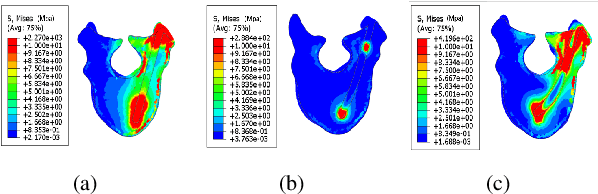
Towards reducing the failure rate of spinal fixation surgical procedures in osteoporotic patients, we propose a unique biomechanically-aware framework for the design of a novel concentric tube steerable drilling robot (CT-SDR). The proposed framework leverages a patient-specific finite element (FE) biomechanics model developed based on Quantitative Computed Tomography (QCT) scans of the patient's vertebra to calculate a biomechanically-optimal and feasible drilling and implantation trajectory. The FE output is then used as a design requirement for the design and evaluation of the CT-SDR. Providing a balance between the necessary flexibility to create curved optimal trajectories obtained by the FE module with the required strength to not buckle during drilling through a hard simulated bone material, we showed that the CT-SDR can reliably recreate this drilling trajectory with errors between 1.7-2.2%