 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMachine Learning Applications in Spine Biomechanics
Jan 10, 2024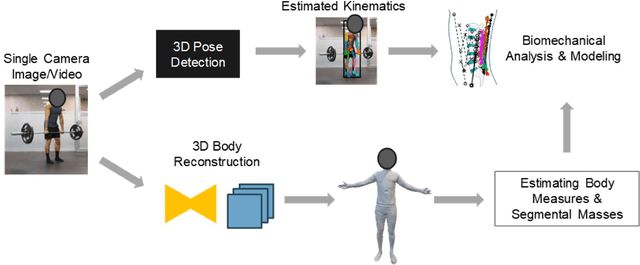
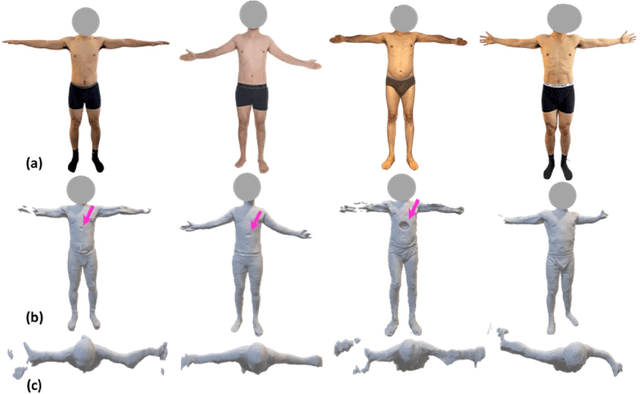
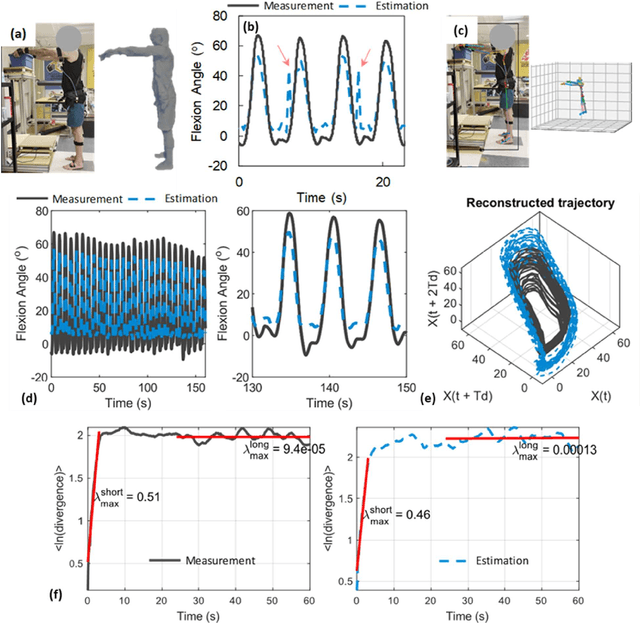
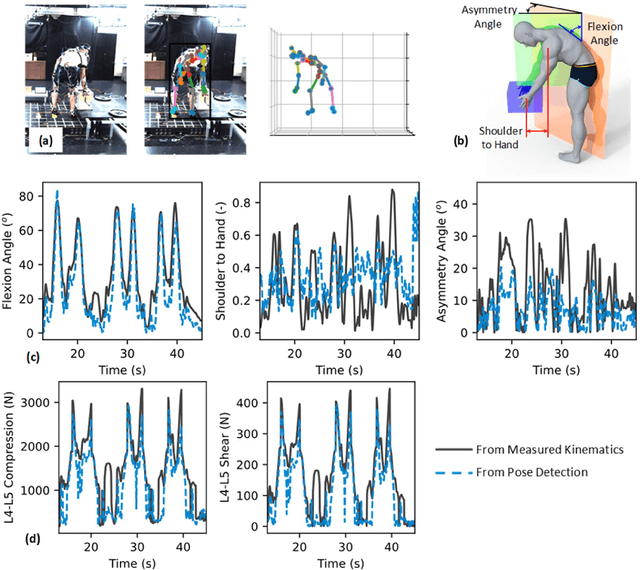
Spine biomechanics is at a transformation with the advent and integration of machine learning and computer vision technologies. These novel techniques facilitate the estimation of 3D body shapes, anthropometrics, and kinematics from as simple as a single-camera image, making them more accessible and practical for a diverse range of applications. This study introduces a framework that merges these methodologies with traditional musculoskeletal modeling, enabling comprehensive analysis of spinal biomechanics during complex activities from a single camera. Additionally, we aim to evaluate their performance and limitations in spine biomechanics applications. The real-world applications explored in this study include assessment in workplace lifting, evaluation of whiplash injuries in car accidents, and biomechanical analysis in professional sports. Our results demonstrate potential and limitations of various algorithms in estimating body shape, kinematics, and conducting in-field biomechanical analyses. In industrial settings, the potential to utilize these new technologies for biomechanical risk assessments offers a pathway for preventive measures against back injuries. In sports activities, the proposed framework provides new opportunities for performance optimization, injury prevention, and rehabilitation. The application in forensic domain further underscores the wide-reaching implications of this technology. While certain limitations were identified, particularly in accuracy of predictions, complex interactions, and external load estimation, this study demonstrates their potential for advancement in spine biomechanics, heralding an optimistic future in both research and practical applications.
Towards Biomechanics-Aware Design of a Steerable Drilling Robot for Spinal Fixation Procedures with Flexible Pedicle Screws
May 24, 2023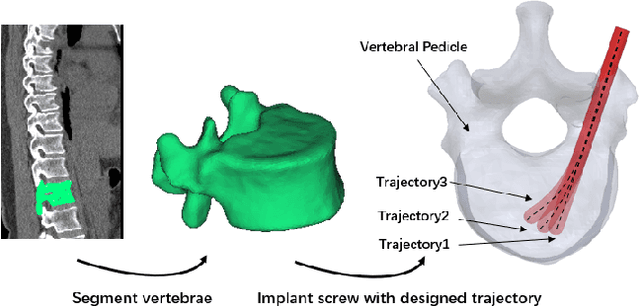
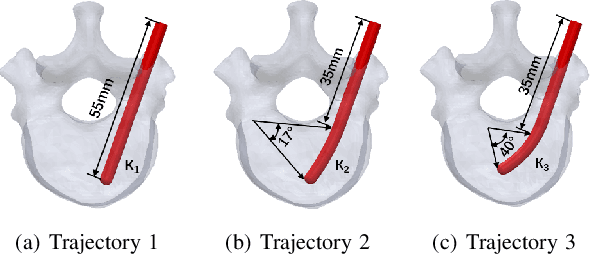
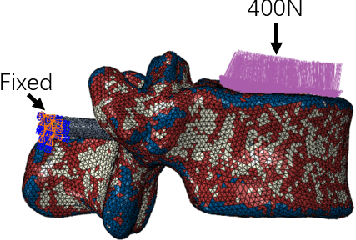
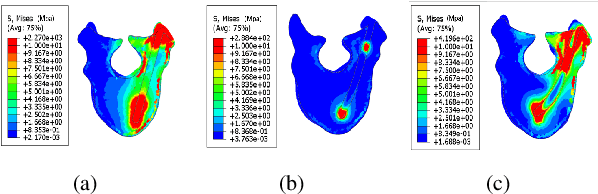
Towards reducing the failure rate of spinal fixation surgical procedures in osteoporotic patients, we propose a unique biomechanically-aware framework for the design of a novel concentric tube steerable drilling robot (CT-SDR). The proposed framework leverages a patient-specific finite element (FE) biomechanics model developed based on Quantitative Computed Tomography (QCT) scans of the patient's vertebra to calculate a biomechanically-optimal and feasible drilling and implantation trajectory. The FE output is then used as a design requirement for the design and evaluation of the CT-SDR. Providing a balance between the necessary flexibility to create curved optimal trajectories obtained by the FE module with the required strength to not buckle during drilling through a hard simulated bone material, we showed that the CT-SDR can reliably recreate this drilling trajectory with errors between 1.7-2.2%