 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards Biomechanics-Aware Design of a Steerable Drilling Robot for Spinal Fixation Procedures with Flexible Pedicle Screws
Paper and Code
May 24, 2023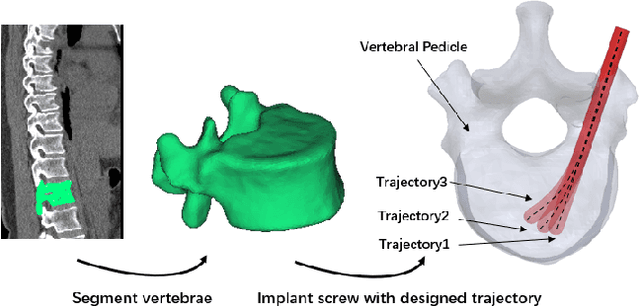
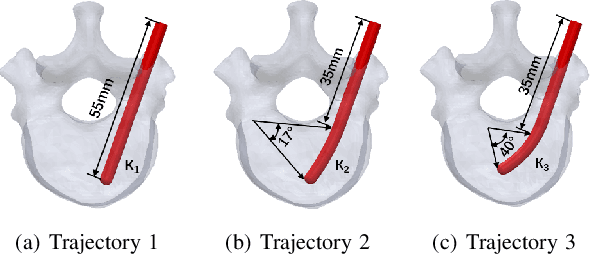
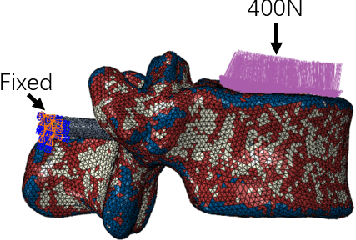
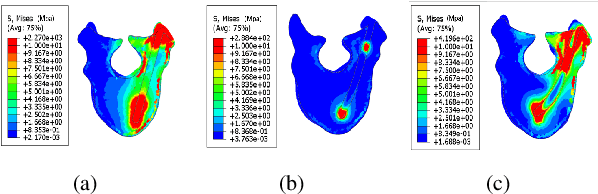
Towards reducing the failure rate of spinal fixation surgical procedures in osteoporotic patients, we propose a unique biomechanically-aware framework for the design of a novel concentric tube steerable drilling robot (CT-SDR). The proposed framework leverages a patient-specific finite element (FE) biomechanics model developed based on Quantitative Computed Tomography (QCT) scans of the patient's vertebra to calculate a biomechanically-optimal and feasible drilling and implantation trajectory. The FE output is then used as a design requirement for the design and evaluation of the CT-SDR. Providing a balance between the necessary flexibility to create curved optimal trajectories obtained by the FE module with the required strength to not buckle during drilling through a hard simulated bone material, we showed that the CT-SDR can reliably recreate this drilling trajectory with errors between 1.7-2.2%