 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobot-Enabled Machine Learning-Based Diagnosis of Gastric Cancer Polyps Using Partial Surface Tactile Imaging
Aug 02, 2024


In this paper, to collectively address the existing limitations on endoscopic diagnosis of Advanced Gastric Cancer (AGC) Tumors, for the first time, we propose (i) utilization and evaluation of our recently developed Vision-based Tactile Sensor (VTS), and (ii) a complementary Machine Learning (ML) algorithm for classifying tumors using their textural features. Leveraging a seven DoF robotic manipulator and unique custom-designed and additively-manufactured realistic AGC tumor phantoms, we demonstrated the advantages of automated data collection using the VTS addressing the problem of data scarcity and biases encountered in traditional ML-based approaches. Our synthetic-data-trained ML model was successfully evaluated and compared with traditional ML models utilizing various statistical metrics even under mixed morphological characteristics and partial sensor contact.
Towards an Autonomous Minimally Invasive Spinal Fixation Surgery Using a Concentric Tube Steerable Drilling Robot
May 29, 2024



Towards performing a realistic autonomous minimally invasive spinal fixation procedure, in this paper, we introduce a unique robotic drilling system utilizing a concentric tube steerable drilling robot (CT-SDR) integrated with a seven degree-of-freedom robotic manipulator. The CT-SDR in integration with the robotic arm enables creating precise J-shape trajectories enabling access to the areas within the vertebral body that currently are not accessible utilizing existing rigid instruments. To ensure safety and accuracy of the autonomous drilling procedure, we also performed required calibration procedures. The performance of the proposed robotic system and the calibration steps were thoroughly evaluated by performing various drilling experiments on simulated Sawbone samples.
Spatial Spinal Fixation: A Transformative Approach Using a Unique Robot-Assisted Steerable Drilling System and Flexible Pedicle Screw
May 27, 2024



Spinal fixation procedures are currently limited by the rigidity of the existing instruments and pedicle screws leading to fixation failures and rigid pedicle screw pull out. Leveraging our recently developed Concentric Tube Steerable Drilling Robot (CT-SDR) in integration with a robotic manipulator, to address the aforementioned issue, here we introduce the transformative concept of Spatial Spinal Fixation (SSF) using a unique Flexible Pedicle Screw (FPS). The proposed SSF procedure enables planar and out-of-plane placement of the FPS throughout the full volume of the vertebral body. In other words, not only does our fixation system provide the option of drilling in-plane and out-of-plane trajectories, it also enables implanting the FPS inside linear (represented by an I-shape) and/or non-linear (represented by J-shape) trajectories. To thoroughly evaluate the functionality of our proposed robotic system and the SSF procedure, we have performed various experiments by drilling different I-J and J-J drilling trajectory pairs into our custom-designed L3 vertebral phantoms and analyzed the accuracy of the procedure using various metrics.
Classification of Colorectal Cancer Polyps via Transfer Learning and Vision-Based Tactile Sensing
Nov 08, 2022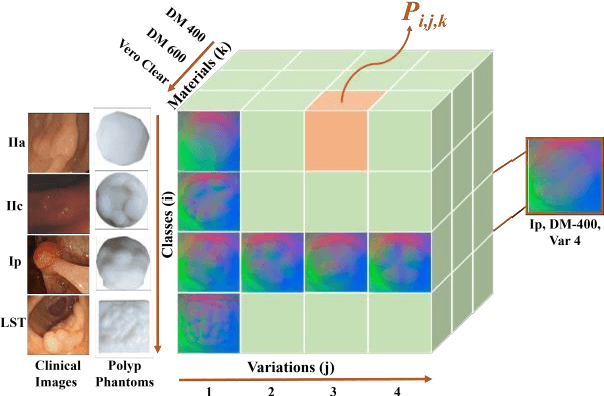
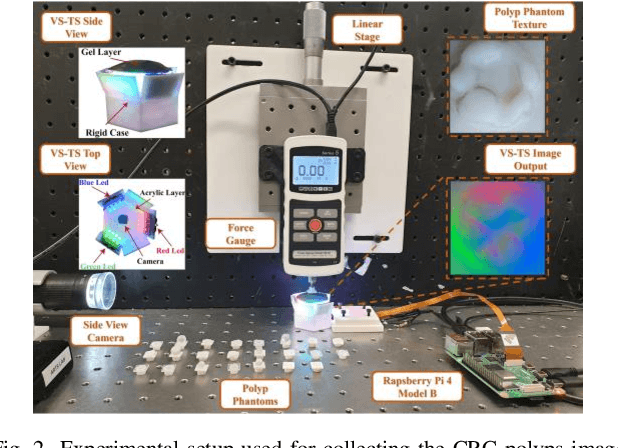
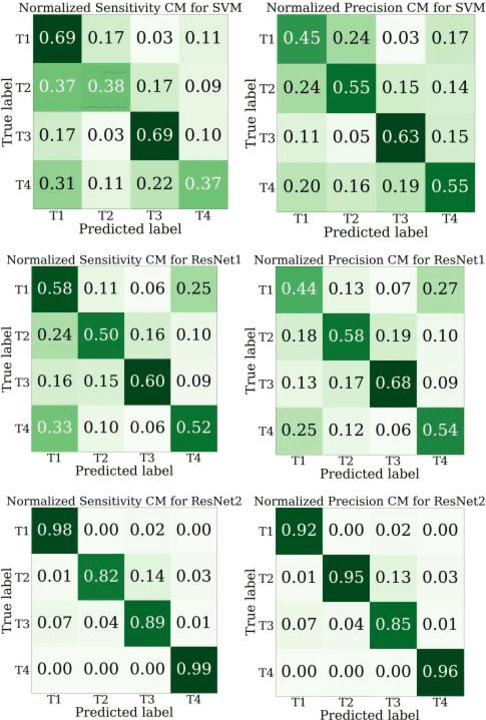
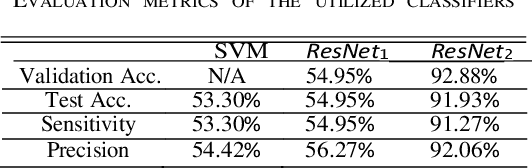
In this study, to address the current high earlydetection miss rate of colorectal cancer (CRC) polyps, we explore the potentials of utilizing transfer learning and machine learning (ML) classifiers to precisely and sensitively classify the type of CRC polyps. Instead of using the common colonoscopic images, we applied three different ML algorithms on the 3D textural image outputs of a unique vision-based surface tactile sensor (VS-TS). To collect realistic textural images of CRC polyps for training the utilized ML classifiers and evaluating their performance, we first designed and additively manufactured 48 types of realistic polyp phantoms with different hardness, type, and textures. Next, the performance of the used three ML algorithms in classifying the type of fabricated polyps was quantitatively evaluated using various statistical metrics.