 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeConformal Prediction on Quantifying Uncertainty of Dynamic Systems
Dec 17, 2024



Numerous studies have focused on learning and understanding the dynamics of physical systems from video data, such as spatial intelligence. Artificial intelligence requires quantitative assessments of the uncertainty of the model to ensure reliability. However, there is still a relative lack of systematic assessment of the uncertainties, particularly the uncertainties of the physical data. Our motivation is to introduce conformal prediction into the uncertainty assessment of dynamical systems, providing a method supported by theoretical guarantees. This paper uses the conformal prediction method to assess uncertainties with benchmark operator learning methods. We have also compared the Monte Carlo Dropout and Ensemble methods in the partial differential equations dataset, effectively evaluating uncertainty through straight roll-outs, making it ideal for time-series tasks.
LE-PDE++: Mamba for accelerating PDEs Simulations
Nov 04, 2024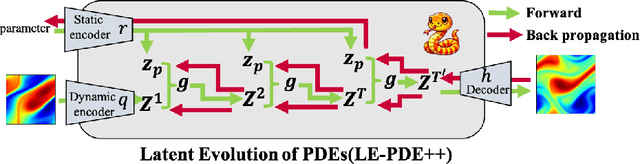
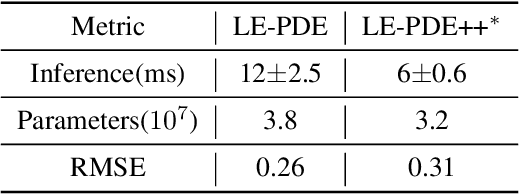
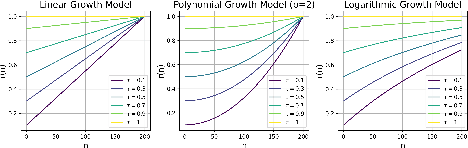
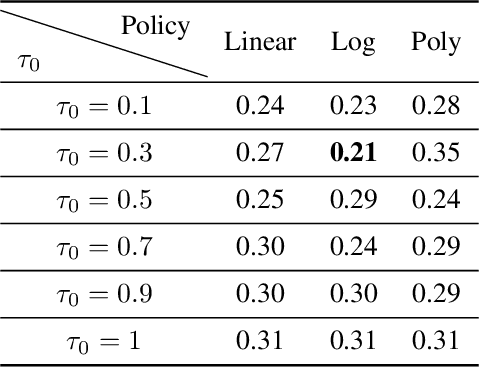
Partial Differential Equations are foundational in modeling science and natural systems such as fluid dynamics and weather forecasting. The Latent Evolution of PDEs method is designed to address the computational intensity of classical and deep learning-based PDE solvers by proposing a scalable and efficient alternative. To enhance the efficiency and accuracy of LE-PDE, we incorporate the Mamba model, an advanced machine learning model known for its predictive efficiency and robustness in handling complex dynamic systems with a progressive learning strategy. The LE-PDE was tested on several benchmark problems. The method demonstrated a marked reduction in computational time compared to traditional solvers and standalone deep learning models while maintaining high accuracy in predicting system behavior over time. Our method doubles the inference speed compared to the LE-PDE while retaining the same level of parameter efficiency, making it well-suited for scenarios requiring long-term predictions.
DamFormer: Generalizing Morphologies in Dam Break Simulations Using Transformer Model
Oct 17, 2024The interaction of waves with structural barriers such as dams breaking plays a critical role in flood defense and tsunami disasters. In this work, we explore the dynamic changes in wave surfaces impacting various structural shapes, e.g., circle, triangle, and square, by using deep learning techniques. We introduce the DamFormer, a novel transformer-based model designed to learn and simulate these complex interactions. The model was trained and tested on simulated data representing the three structural forms.
Learning Adaptive Hydrodynamic Models Using Neural ODEs in Complex Conditions
Oct 01, 2024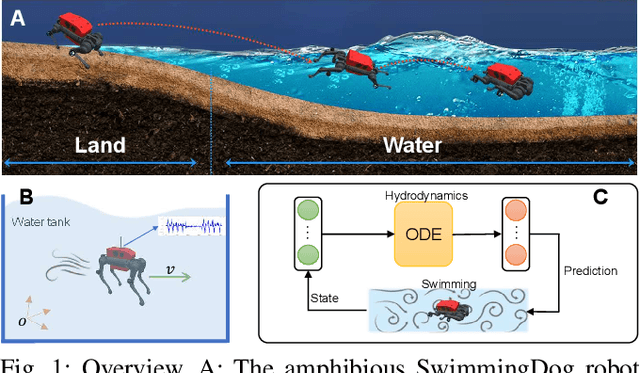
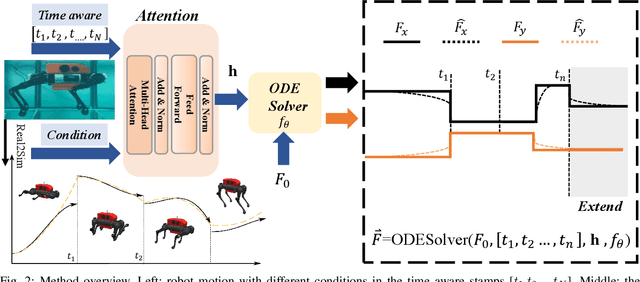
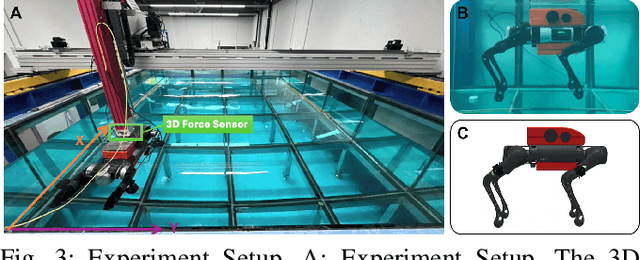
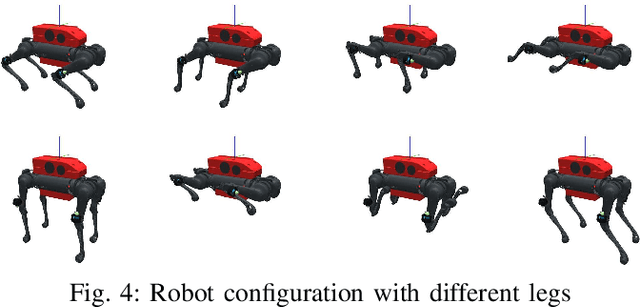
Reinforcement learning-based quadruped robots excel across various terrains but still lack the ability to swim in water due to the complex underwater environment. This paper presents the development and evaluation of a data-driven hydrodynamic model for amphibious quadruped robots, aiming to enhance their adaptive capabilities in complex and dynamic underwater environments. The proposed model leverages Neural Ordinary Differential Equations (ODEs) combined with attention mechanisms to accurately process and interpret real-time sensor data. The model enables the quadruped robots to understand and predict complex environmental patterns, facilitating robust decision-making strategies. We harness real-time sensor data, capturing various environmental and internal state parameters to train and evaluate our model. A significant focus of our evaluation involves testing the quadruped robot's performance across different hydrodynamic conditions and assessing its capabilities at varying speeds and fluid dynamic conditions. The outcomes suggest that the model can effectively learn and adapt to varying conditions, enabling the prediction of force states and enhancing autonomous robotic behaviors in various practical scenarios.