 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBiomechGPT: Towards a Biomechanically Fluent Multimodal Foundation Model for Clinically Relevant Motion Tasks
May 24, 2025



Advances in markerless motion capture are expanding access to biomechanical movement analysis, making it feasible to obtain high-quality movement data from outpatient clinics, inpatient hospitals, therapy, and even home. Expanding access to movement data in these diverse contexts makes the challenge of performing downstream analytics all the more acute. Creating separate bespoke analysis code for all the tasks end users might want is both intractable and does not take advantage of the common features of human movement underlying them all. Recent studies have shown that fine-tuning language models to accept tokenized movement as an additional modality enables successful descriptive captioning of movement. Here, we explore whether such a multimodal motion-language model can answer detailed, clinically meaningful questions about movement. We collected over 30 hours of biomechanics from nearly 500 participants, many with movement impairments from a variety of etiologies, performing a range of movements used in clinical outcomes assessments. After tokenizing these movement trajectories, we created a multimodal dataset of motion-related questions and answers spanning a range of tasks. We developed BiomechGPT, a multimodal biomechanics-language model, on this dataset. Our results show that BiomechGPT demonstrates high performance across a range of tasks such as activity recognition, identifying movement impairments, diagnosis, scoring clinical outcomes, and measuring walking. BiomechGPT provides an important step towards a foundation model for rehabilitation movement data.
BKinD-3D: Self-Supervised 3D Keypoint Discovery from Multi-View Videos
Dec 14, 2022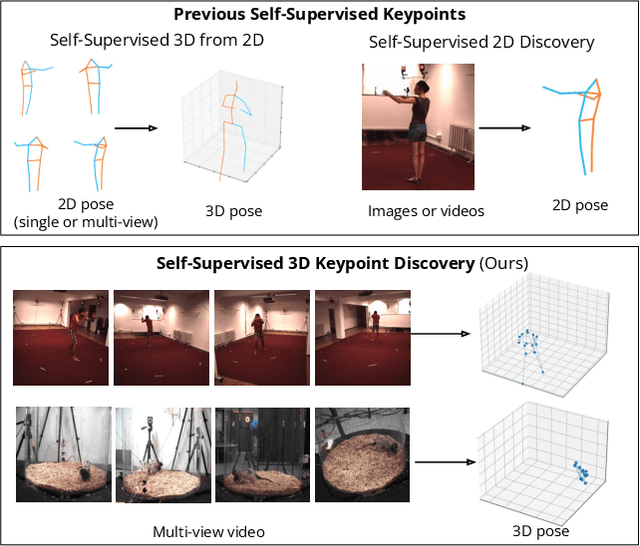
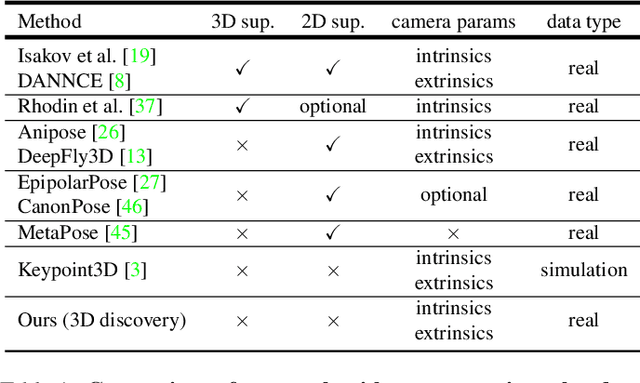
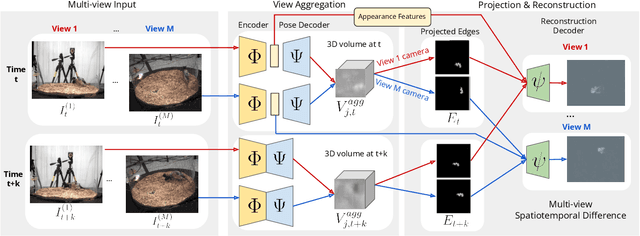
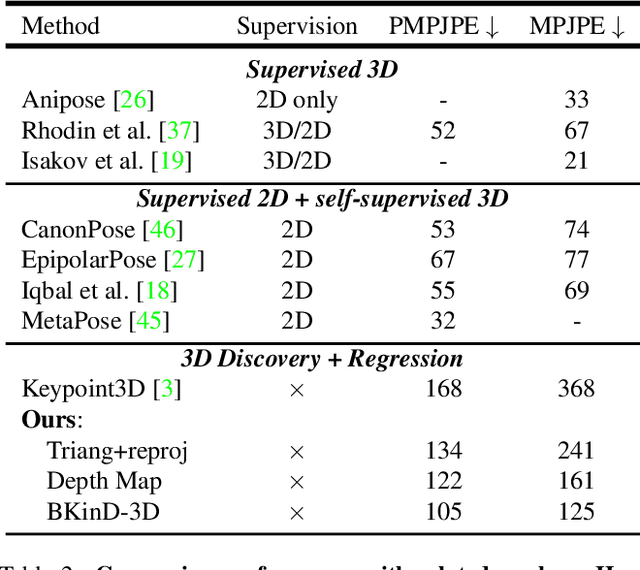
Quantifying motion in 3D is important for studying the behavior of humans and other animals, but manual pose annotations are expensive and time-consuming to obtain. Self-supervised keypoint discovery is a promising strategy for estimating 3D poses without annotations. However, current keypoint discovery approaches commonly process single 2D views and do not operate in the 3D space. We propose a new method to perform self-supervised keypoint discovery in 3D from multi-view videos of behaving agents, without any keypoint or bounding box supervision in 2D or 3D. Our method uses an encoder-decoder architecture with a 3D volumetric heatmap, trained to reconstruct spatiotemporal differences across multiple views, in addition to joint length constraints on a learned 3D skeleton of the subject. In this way, we discover keypoints without requiring manual supervision in videos of humans and rats, demonstrating the potential of 3D keypoint discovery for studying behavior.
The MABe22 Benchmarks for Representation Learning of Multi-Agent Behavior
Jul 21, 2022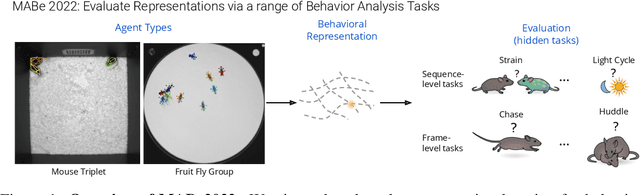
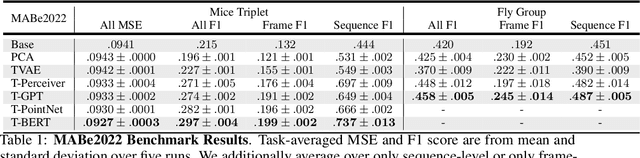
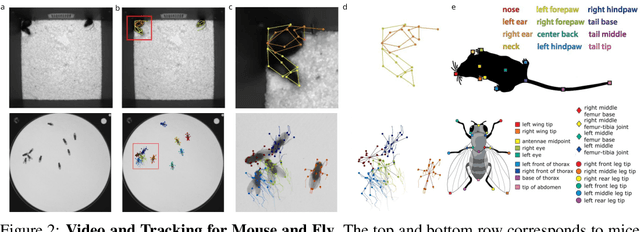
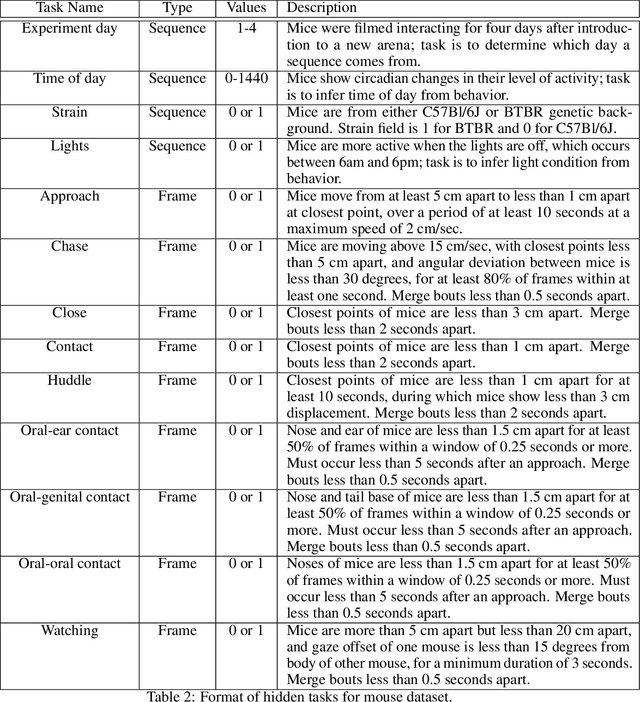
Real-world behavior is often shaped by complex interactions between multiple agents. To scalably study multi-agent behavior, advances in unsupervised and self-supervised learning have enabled a variety of different behavioral representations to be learned from trajectory data. To date, there does not exist a unified set of benchmarks that can enable comparing methods quantitatively and systematically across a broad set of behavior analysis settings. We aim to address this by introducing a large-scale, multi-agent trajectory dataset from real-world behavioral neuroscience experiments that covers a range of behavior analysis tasks. Our dataset consists of trajectory data from common model organisms, with 9.6 million frames of mouse data and 4.4 million frames of fly data, in a variety of experimental settings, such as different strains, lengths of interaction, and optogenetic stimulation. A subset of the frames also consist of expert-annotated behavior labels. Improvements on our dataset corresponds to behavioral representations that work across multiple organisms and is able to capture differences for common behavior analysis tasks.
Self-Supervised Keypoint Discovery in Behavioral Videos
Dec 09, 2021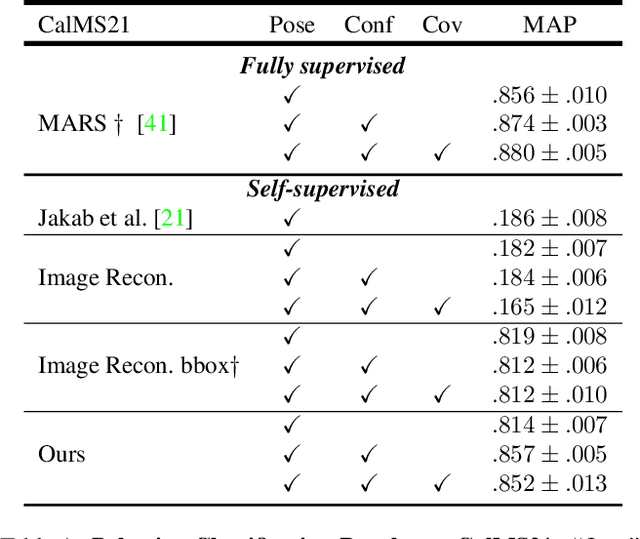
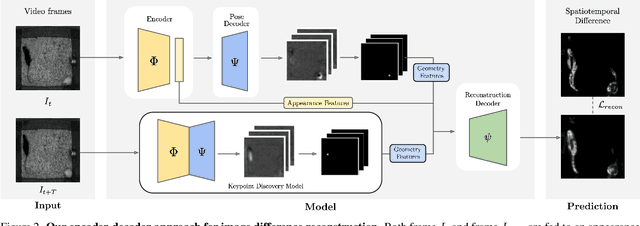
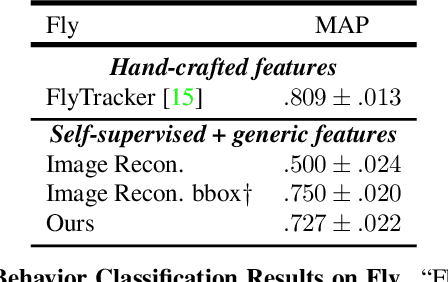
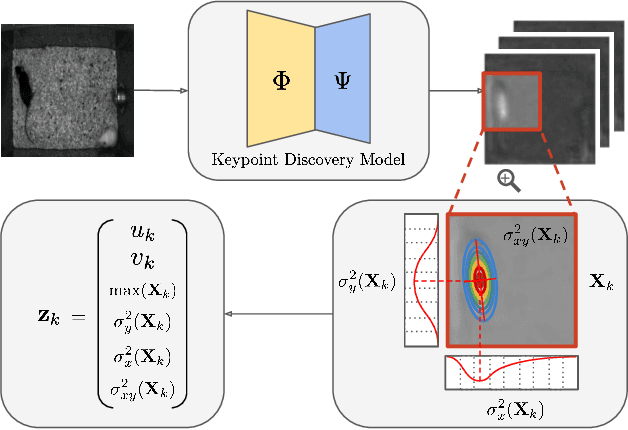
We propose a method for learning the posture and structure of agents from unlabelled behavioral videos. Starting from the observation that behaving agents are generally the main sources of movement in behavioral videos, our method uses an encoder-decoder architecture with a geometric bottleneck to reconstruct the difference between video frames. By focusing only on regions of movement, our approach works directly on input videos without requiring manual annotations, such as keypoints or bounding boxes. Experiments on a variety of agent types (mouse, fly, human, jellyfish, and trees) demonstrate the generality of our approach and reveal that our discovered keypoints represent semantically meaningful body parts, which achieve state-of-the-art performance on keypoint regression among self-supervised methods. Additionally, our discovered keypoints achieve comparable performance to supervised keypoints on downstream tasks, such as behavior classification, suggesting that our method can dramatically reduce the cost of model training vis-a-vis supervised methods.
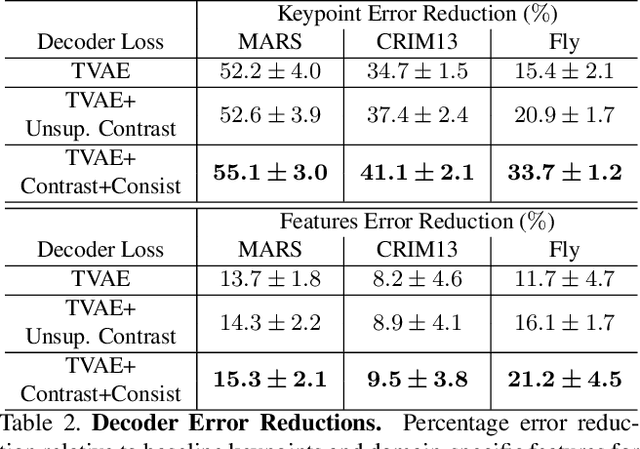
Unsupervised Learning of Neurosymbolic Encoders
Jul 28, 2021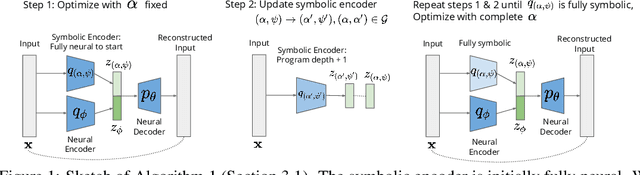

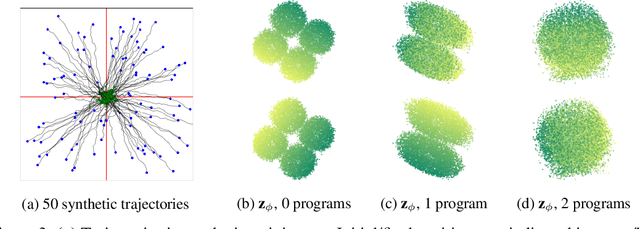
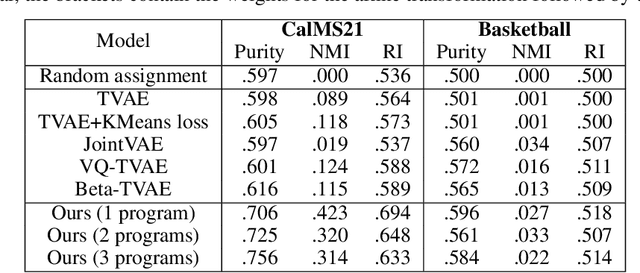
We present a framework for the unsupervised learning of neurosymbolic encoders, i.e., encoders obtained by composing neural networks with symbolic programs from a domain-specific language. Such a framework can naturally incorporate symbolic expert knowledge into the learning process and lead to more interpretable and factorized latent representations than fully neural encoders. Also, models learned this way can have downstream impact, as many analysis workflows can benefit from having clean programmatic descriptions. We ground our learning algorithm in the variational autoencoding (VAE) framework, where we aim to learn a neurosymbolic encoder in conjunction with a standard decoder. Our algorithm integrates standard VAE-style training with modern program synthesis techniques. We evaluate our method on learning latent representations for real-world trajectory data from animal biology and sports analytics. We show that our approach offers significantly better separation than standard VAEs and leads to practical gains on downstream tasks.
Interpreting Expert Annotation Differences in Animal Behavior
Jun 11, 2021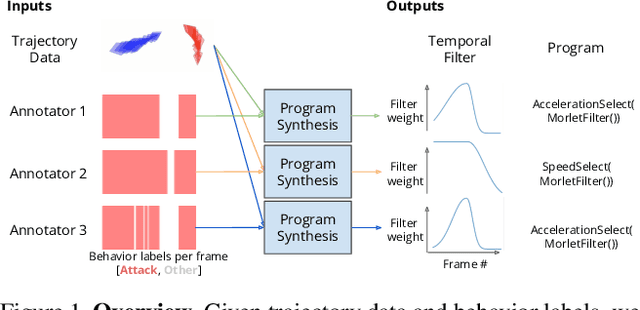

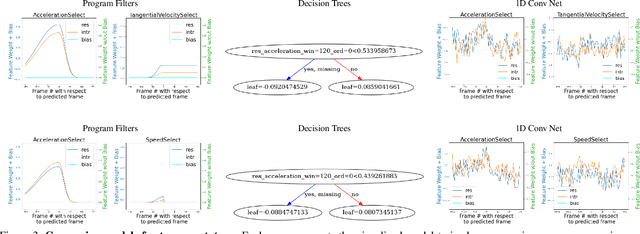
Hand-annotated data can vary due to factors such as subjective differences, intra-rater variability, and differing annotator expertise. We study annotations from different experts who labelled the same behavior classes on a set of animal behavior videos, and observe a variation in annotation styles. We propose a new method using program synthesis to help interpret annotation differences for behavior analysis. Our model selects relevant trajectory features and learns a temporal filter as part of a program, which corresponds to estimated importance an annotator places on that feature at each timestamp. Our experiments on a dataset from behavioral neuroscience demonstrate that compared to baseline approaches, our method is more accurate at capturing annotator labels and learns interpretable temporal filters. We believe that our method can lead to greater reproducibility of behavior annotations used in scientific studies. We plan to release our code.
The Multi-Agent Behavior Dataset: Mouse Dyadic Social Interactions
Apr 07, 2021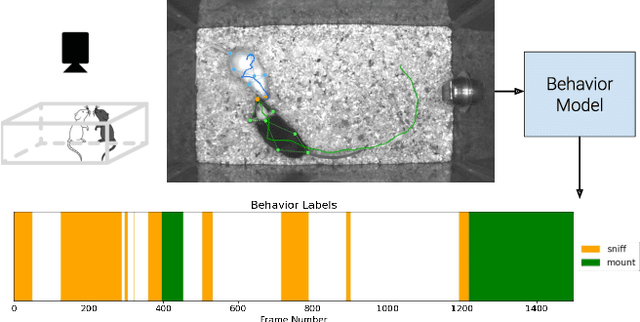
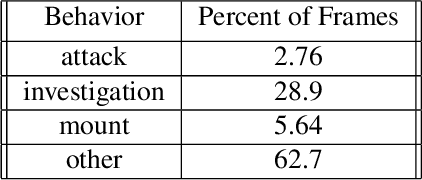

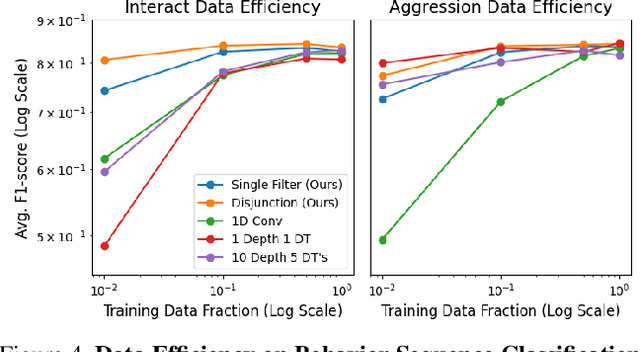
Multi-agent behavior modeling aims to understand the interactions that occur between agents. We present a multi-agent dataset from behavioral neuroscience, the Caltech Mouse Social Interactions (CalMS21) Dataset. Our dataset consists of trajectory data of social interactions, recorded from videos of freely behaving mice in a standard resident-intruder assay. The CalMS21 dataset is part of the Multi-Agent Behavior Challenge 2021 and for our next step, our goal is to incorporate datasets from other domains studying multi-agent behavior. To help accelerate behavioral studies, the CalMS21 dataset provides a benchmark to evaluate the performance of automated behavior classification methods in three settings: (1) for training on large behavioral datasets all annotated by a single annotator, (2) for style transfer to learn inter-annotator differences in behavior definitions, and (3) for learning of new behaviors of interest given limited training data. The dataset consists of 6 million frames of unlabelled tracked poses of interacting mice, as well as over 1 million frames with tracked poses and corresponding frame-level behavior annotations. The challenge of our dataset is to be able to classify behaviors accurately using both labelled and unlabelled tracking data, as well as being able to generalize to new annotators and behaviors.
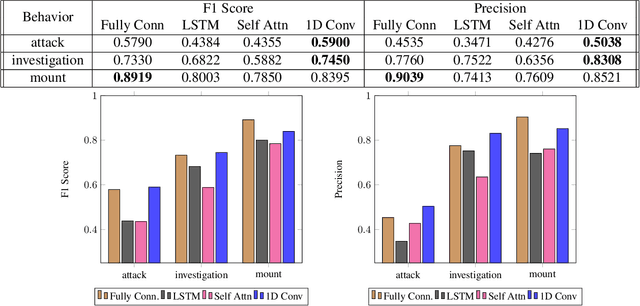
Task Programming: Learning Data Efficient Behavior Representations
Nov 27, 2020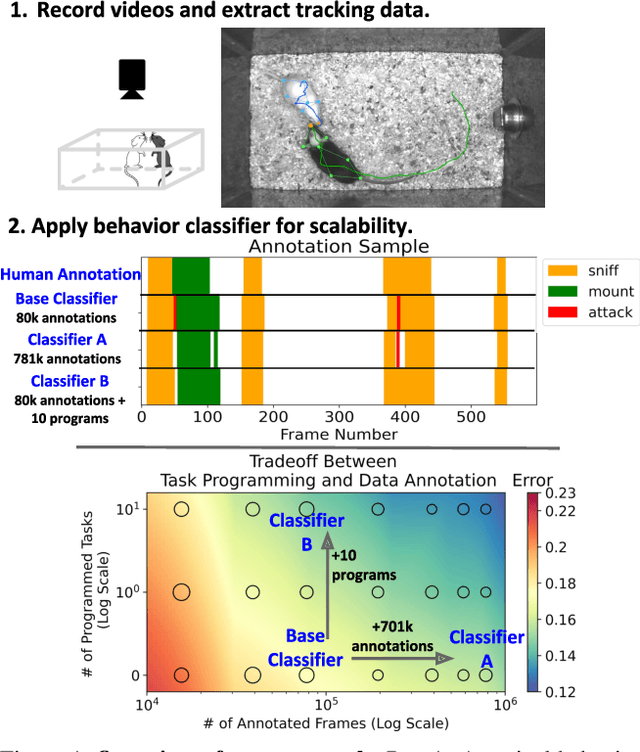
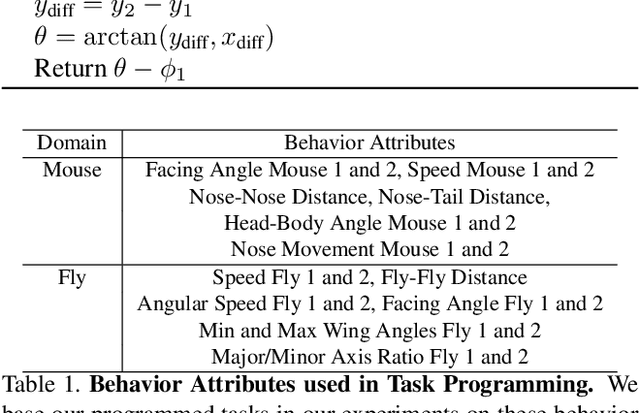
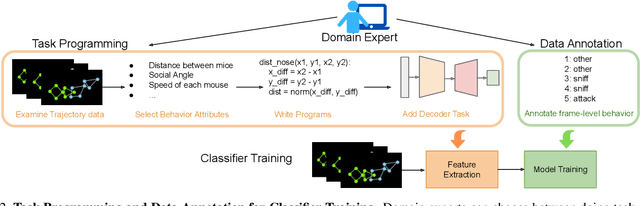
Specialized domain knowledge is often necessary to accurately annotate training sets for in-depth analysis, but can be burdensome and time-consuming to acquire from domain experts. This issue arises prominently in automated behavior analysis, in which agent movements or actions of interest are detected from video tracking data. To reduce annotation effort, we present TREBA: a method to learn annotation-sample efficient trajectory embedding for behavior analysis, based on multi-task self-supervised learning. The tasks in our method can be efficiently engineered by domain experts through a process we call "task programming", which uses programs to explicitly encode structured knowledge from domain experts. Total domain expert effort can be reduced by exchanging data annotation time for the construction of a small number of programmed tasks. We evaluate this trade-off using data from behavioral neuroscience, in which specialized domain knowledge is used to identify behaviors. We present experimental results in three datasets across two domains: mice and fruit flies. Using embeddings from TREBA, we reduce annotation burden by up to a factor of 10 without compromising accuracy compared to state-of-the-art features. Our results thus suggest that task programming can be an effective way to reduce annotation effort for domain experts.