 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeStationarity and Spectral Characterization of Random Signals on Simplicial Complexes
Feb 03, 2026It is increasingly common for data to possess intricate structure, necessitating new models and analytical tools. Graphs, a prominent type of structure, can encode the relationships between any two entities (nodes). However, graphs neither allow connections that are not dyadic nor permit relationships between sets of nodes. We thus turn to simplicial complexes for connecting more than two nodes as well as modeling relationships between simplices, such as edges and triangles. Our data then consist of signals lying on topological spaces, represented by simplicial complexes. Much recent work explores these topological signals, albeit primarily through deterministic formulations. We propose a probabilistic framework for random signals defined on simplicial complexes. Specifically, we generalize the classical notion of stationarity. By spectral dualities of Hodge and Dirac theory, we define stationary topological signals as the outputs of topological filters given white noise. This definition naturally extends desirable properties of stationarity that hold for both time-series and graph signals. Crucially, we properly define topological power spectral density (PSD) through a clear spectral characterization. We then discuss the advantages of topological stationarity due to spectral properties via the PSD. In addition, we empirically demonstrate the practicality of these benefits through multiple synthetic and real-world simulations.
Graph signal aware decomposition of dynamic networks via latent graphs
Jun 10, 2025Dynamics on and of networks refer to changes in topology and node-associated signals, respectively and are pervasive in many socio-technological systems, including social, biological, and infrastructure networks. Due to practical constraints, privacy concerns, or malfunctions, we often observe only a fraction of the topological evolution and associated signal, which not only hinders downstream tasks but also restricts our analysis of network evolution. Such aspects could be mitigated by moving our attention at the underlying latent driving factors of the network evolution, which can be naturally uncovered via low-rank tensor decomposition. Tensor-based methods provide a powerful means of uncovering the underlying factors of network evolution through low-rank decompositions. However, the extracted embeddings typically lack a relational structure and are obtained independently from the node signals. This disconnect reduces the interpretability of the embeddings and overlooks the coupling between topology and signals. To address these limitations, we propose a novel two-way decomposition to represent a dynamic graph topology, where the structural evolution is captured by a linear combination of latent graph adjacency matrices reflecting the overall joint evolution of both the topology and the signal. Using spatio-temporal data, we estimate the latent adjacency matrices and their temporal scaling signatures via alternating minimization, and prove that our approach converges to a stationary point. Numerical results show that the proposed method recovers individually and collectively expressive latent graphs, outperforming both standard tensor-based decompositions and signal-based topology identification methods in reconstructing the missing network especially when observations are limited.
Online Network Inference from Graph-Stationary Signals with Hidden Nodes
Sep 13, 2024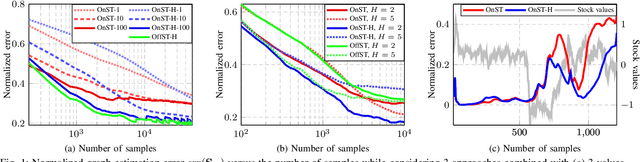
Graph learning is the fundamental task of estimating unknown graph connectivity from available data. Typical approaches assume that not only is all information available simultaneously but also that all nodes can be observed. However, in many real-world scenarios, data can neither be known completely nor obtained all at once. We present a novel method for online graph estimation that accounts for the presence of hidden nodes. We consider signals that are stationary on the underlying graph, which provides a model for the unknown connections to hidden nodes. We then formulate a convex optimization problem for graph learning from streaming, incomplete graph signals. We solve the proposed problem through an efficient proximal gradient algorithm that can run in real-time as data arrives sequentially. Additionally, we provide theoretical conditions under which our online algorithm is similar to batch-wise solutions. Through experimental results on synthetic and real-world data, we demonstrate the viability of our approach for online graph learning in the presence of missing observations.
Fair GLASSO: Estimating Fair Graphical Models with Unbiased Statistical Behavior
Jun 13, 2024We propose estimating Gaussian graphical models (GGMs) that are fair with respect to sensitive nodal attributes. Many real-world models exhibit unfair discriminatory behavior due to biases in data. Such discrimination is known to be exacerbated when data is equipped with pairwise relationships encoded in a graph. Additionally, the effect of biased data on graphical models is largely underexplored. We thus introduce fairness for graphical models in the form of two bias metrics to promote balance in statistical similarities across nodal groups with different sensitive attributes. Leveraging these metrics, we present Fair GLASSO, a regularized graphical lasso approach to obtain sparse Gaussian precision matrices with unbiased statistical dependencies across groups. We also propose an efficient proximal gradient algorithm to obtain the estimates. Theoretically, we express the tradeoff between fair and accurate estimated precision matrices. Critically, this includes demonstrating when accuracy can be preserved in the presence of a fairness regularizer. On top of this, we study the complexity of Fair GLASSO and demonstrate that our algorithm enjoys a fast convergence rate. Our empirical validation includes synthetic and real-world simulations that illustrate the value and effectiveness of our proposed optimization problem and iterative algorithm.
Polynomial Graphical Lasso: Learning Edges from Gaussian Graph-Stationary Signals
Apr 03, 2024



This paper introduces Polynomial Graphical Lasso (PGL), a new approach to learning graph structures from nodal signals. Our key contribution lies in modeling the signals as Gaussian and stationary on the graph, enabling the development of a graph-learning formulation that combines the strengths of graphical lasso with a more encompassing model. Specifically, we assume that the precision matrix can take any polynomial form of the sought graph, allowing for increased flexibility in modeling nodal relationships. Given the resulting complexity and nonconvexity of the resulting optimization problem, we (i) propose a low-complexity algorithm that alternates between estimating the graph and precision matrices, and (ii) characterize its convergence. We evaluate the performance of PGL through comprehensive numerical simulations using both synthetic and real data, demonstrating its superiority over several alternatives. Overall, this approach presents a significant advancement in graph learning and holds promise for various applications in graph-aware signal analysis and beyond.
Mitigating Subpopulation Bias for Fair Network Topology Inference
Mar 22, 2024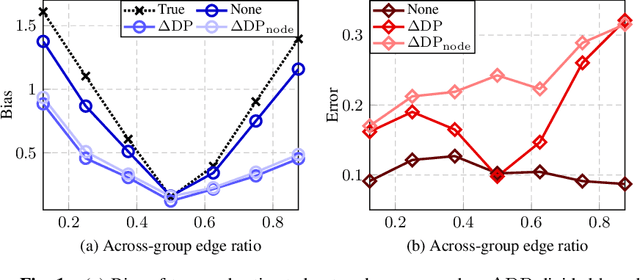
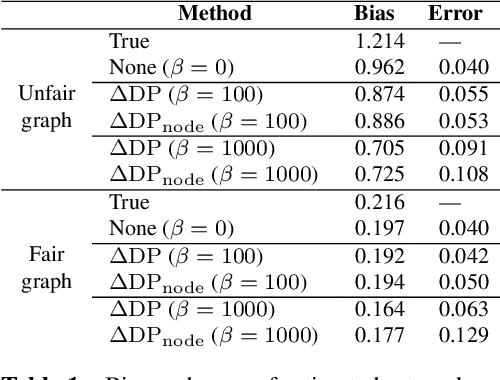
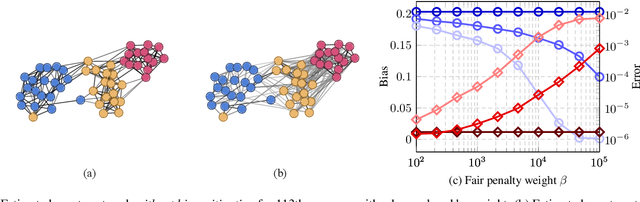
We consider fair network topology inference from nodal observations. Real-world networks often exhibit biased connections based on sensitive nodal attributes. Hence, different subpopulations of nodes may not share or receive information equitably. We thus propose an optimization-based approach to accurately infer networks while discouraging biased edges. To this end, we present bias metrics that measure topological demographic parity to be applied as convex penalties, suitable for most optimization-based graph learning methods. Moreover, we encourage equitable treatment for any number of subpopulations of differing sizes. We validate our method on synthetic and real-world simulations using networks with both biased and unbiased connections.
Learning graphs and simplicial complexes from data
Dec 16, 2023Graphs are widely used to represent complex information and signal domains with irregular support. Typically, the underlying graph topology is unknown and must be estimated from the available data. Common approaches assume pairwise node interactions and infer the graph topology based on this premise. In contrast, our novel method not only unveils the graph topology but also identifies three-node interactions, referred to in the literature as second-order simplicial complexes (SCs). We model signals using a graph autoregressive Volterra framework, enhancing it with structured graph Volterra kernels to learn SCs. We propose a mathematical formulation for graph and SC inference, solving it through convex optimization involving group norms and mask matrices. Experimental results on synthetic and real-world data showcase a superior performance for our approach compared to existing methods.
Joint Network Topology Inference in the Presence of Hidden Nodes
Jun 30, 2023
We investigate the increasingly prominent task of jointly inferring multiple networks from nodal observations. While most joint inference methods assume that observations are available at all nodes, we consider the realistic and more difficult scenario where a subset of nodes are hidden and cannot be measured. Under the assumptions that the partially observed nodal signals are graph stationary and the networks have similar connectivity patterns, we derive structural characteristics of the connectivity between hidden and observed nodes. This allows us to formulate an optimization problem for estimating networks while accounting for the influence of hidden nodes. We identify conditions under which a convex relaxation yields the sparsest solution, and we formalize the performance of our proposed optimization problem with respect to the effect of the hidden nodes. Finally, synthetic and real-world simulations provide evaluations of our method in comparison with other baselines.
Graph Learning from Gaussian and Stationary Graph Signals
Mar 13, 2023
Graphs have become pervasive tools to represent information and datasets with irregular support. However, in many cases, the underlying graph is either unavailable or naively obtained, calling for more advanced methods to its estimation. Indeed, graph topology inference methods that estimate the network structure from a set of signal observations have a long and well established history. By assuming that the observations are both Gaussian and stationary in the sought graph, this paper proposes a new scheme to learn the network from nodal observations. Consideration of graph stationarity overcomes some of the limitations of the classical Graphical Lasso algorithm, which is constrained to a more specific class of graphical models. On the other hand, Gaussianity allows us to regularize the estimation, requiring less samples than in existing graph stationarity-based approaches. While the resultant estimation (optimization) problem is more complex and non-convex, we design an alternating convex approach able to find a stationary solution. Numerical tests with synthetic and real data are presented, and the performance of our approach is compared with existing alternatives.
Joint graph learning from Gaussian observations in the presence of hidden nodes
Dec 04, 2022
Graph learning problems are typically approached by focusing on learning the topology of a single graph when signals from all nodes are available. However, many contemporary setups involve multiple related networks and, moreover, it is often the case that only a subset of nodes is observed while the rest remain hidden. Motivated by this, we propose a joint graph learning method that takes into account the presence of hidden (latent) variables. Intuitively, the presence of the hidden nodes renders the inference task ill-posed and challenging to solve, so we overcome this detrimental influence by harnessing the similarity of the estimated graphs. To that end, we assume that the observed signals are drawn from a Gaussian Markov random field with latent variables and we carefully model the graph similarity among hidden (latent) nodes. Then, we exploit the structure resulting from the previous considerations to propose a convex optimization problem that solves the joint graph learning task by providing a regularized maximum likelihood estimator. Finally, we compare the proposed algorithm with different baselines and evaluate its performance over synthetic and real-world graphs.