 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCONCERT: a Modular Reconfigurable Robot for Construction
Apr 07, 2025This paper presents CONCERT, a fully reconfigurable modular collaborative robot (cobot) for multiple on-site operations in a construction site. CONCERT has been designed to support human activities in construction sites by leveraging two main characteristics: high-power density motors and modularity. In this way, the robot is able to perform a wide range of highly demanding tasks by acting as a co-worker of the human operator or by autonomously executing them following user instructions. Most of its versatility comes from the possibility of rapidly changing its kinematic structure by adding or removing passive or active modules. In this way, the robot can be set up in a vast set of morphologies, consequently changing its workspace and capabilities depending on the task to be executed. In the same way, distal end-effectors can be replaced for the execution of different operations. This paper also includes a full description of the software pipeline employed to automatically discover and deploy the robot morphology. Specifically, depending on the modules installed, the robot updates the kinematic, dynamic, and geometric parameters, taking into account the information embedded in each module. In this way, we demonstrate how the robot can be fully reassembled and made operational in less than ten minutes. We validated the CONCERT robot across different use cases, including drilling, sanding, plastering, and collaborative transportation with obstacle avoidance, all performed in a real construction site scenario. We demonstrated the robot's adaptivity and performance in multiple scenarios characterized by different requirements in terms of power and workspace. CONCERT has been designed and built by the Humanoid and Human-Centered Mechatronics Laboratory (HHCM) at the Istituto Italiano di Tecnologia in the context of the European Project Horizon 2020 CONCERT.
Holistic Construction Automation with Modular Robots: From High-Level Task Specification to Execution
Dec 30, 2024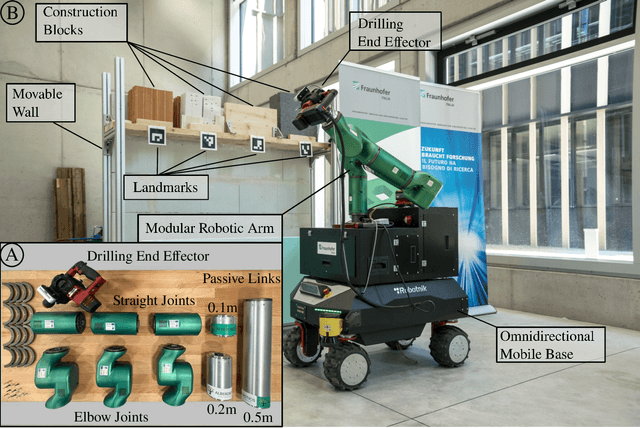
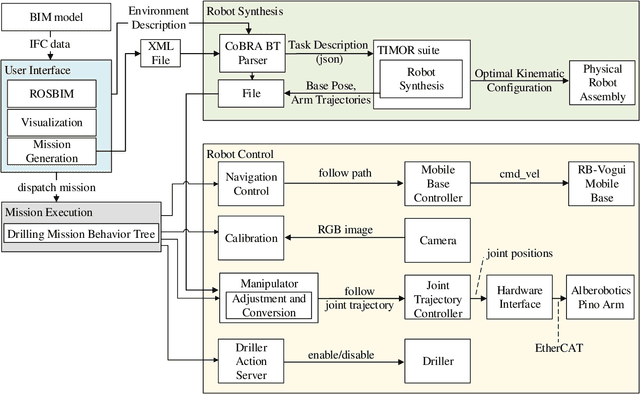
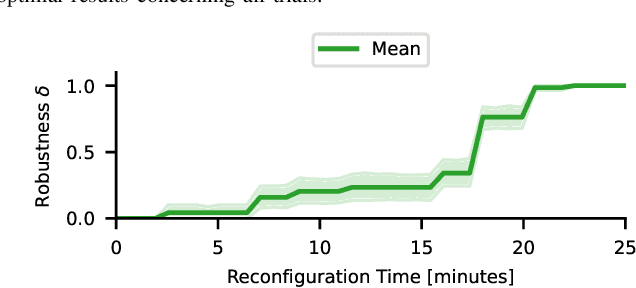
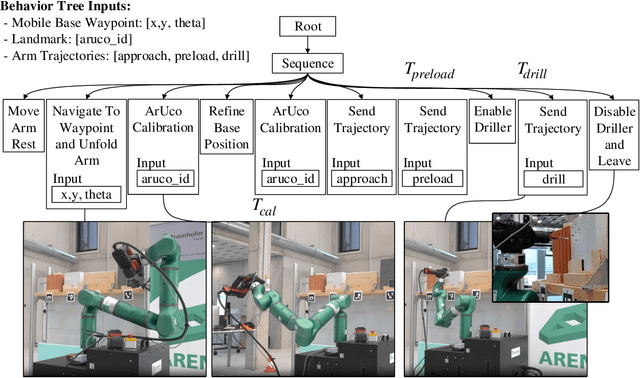
In situ robotic automation in construction is challenging due to constantly changing environments, a shortage of robotic experts, and a lack of standardized frameworks bridging robotics and construction practices. This work proposes a holistic framework for construction task specification, optimization of robot morphology, and mission execution using a mobile modular reconfigurable robot. Users can specify and monitor the desired robot behavior through a graphical interface. Our framework identifies an optimized robot morphology and enables automatic real-world execution by integrating Building Information Modelling (BIM). By leveraging modular robot components, we ensure seamless and fast adaption to the specific demands of the construction task. Experimental validation demonstrates that our approach robustly enables the autonomous execution of robotic drilling.
Modelling and Control of Spatial Behaviours in Multi-Agent Systems with Applications to Biology and Robotics
Dec 30, 2024Large-Scale Multi-Agent Systems (LS-MAS) consist of several autonomous components, interacting in a non-trivial way, so that the emerging behaviour of the ensemble depends on the individual dynamics of the components and their reciprocal interactions. These models can describe a rich variety of natural systems, as well as artificial ones, characterised by unparalleled scalability, robustness, and flexibility. Indeed, a crucial objective is devising efficient strategies to model and control the spatial behaviours of LS-MAS to achieve specific goals. However, the inherent complexity of these systems and the wide spectrum of their emerging behaviours pose significant challenges. The overarching goal of this thesis is, therefore, to advance methods for modelling, analyzing and controlling the spatial behaviours of LS-MAS, with applications to cellular populations and swarm robotics. The thesis begins with an overview of the existing Literature, and is then organized into two distinct parts. In the context of swarm robotics, Part I deals with distributed control algorithms to spatially organize agents on geometric patterns. The contribution is twofold, encompassing both the development of original control algorithms, and providing a novel formal analysis, which allows to guarantee the emergence of specific geometric patterns. In Part II, looking at the spatial behaviours of biological agents, experiments are carried out to study the movement of microorganisms and their response to light stimuli. This allows the derivation and parametrization of mathematical models that capture these behaviours, and pave the way for the development of innovative approaches for the spatial control of microorganisms. The results presented in the thesis were developed by leveraging formal analytical tools, simulations, and experiments, using innovative platforms and original computational frameworks.
Collaborative AI Needs Stronger Assurances Driven by Risks
Dec 01, 2021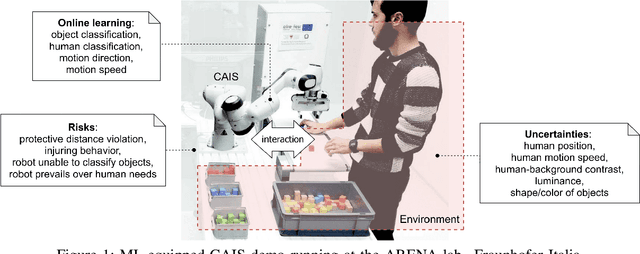
Collaborative AI systems (CAISs) aim at working together with humans in a shared space to achieve a common goal. This critical setting yields hazardous circumstances that could harm human beings. Thus, building such systems with strong assurances of compliance with requirements, domain-specific standards and regulations is of greatest importance. Only few scale impact has been reported so far for such systems since much work remains to manage possible risks. We identify emerging problems in this context and then we report our vision, as well as the progress of our multidisciplinary research team composed of software/systems, and mechatronics engineers to develop a risk-driven assurance process for CAISs.
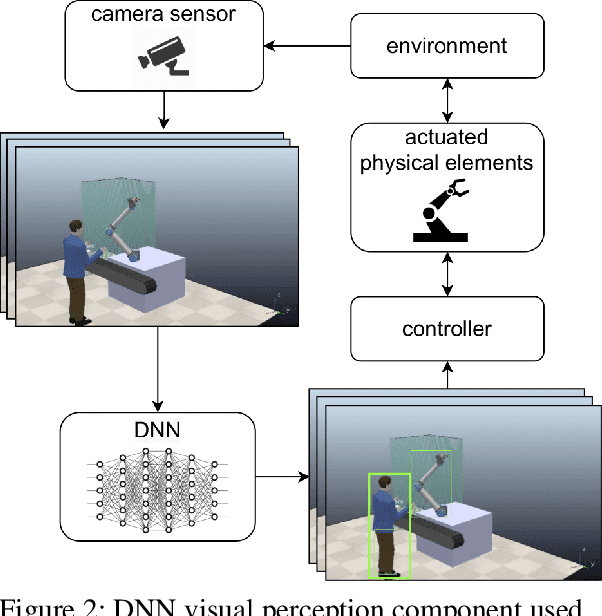
Towards Risk Modeling for Collaborative AI
Mar 12, 2021

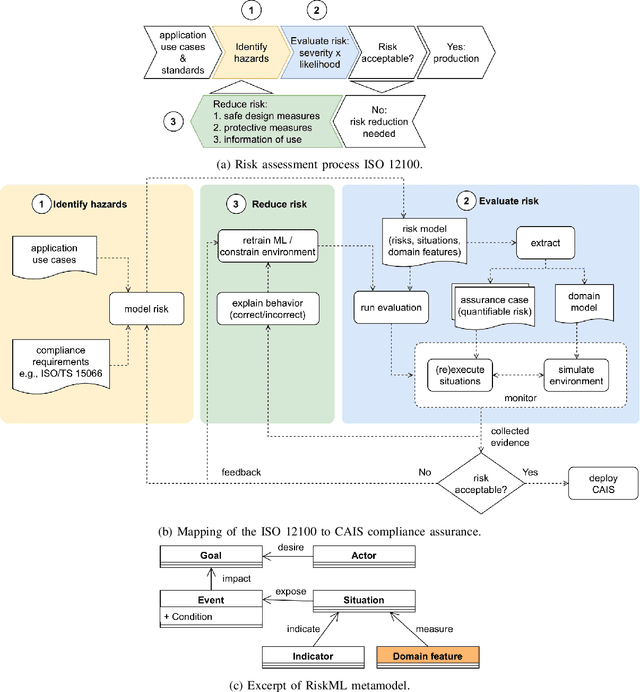
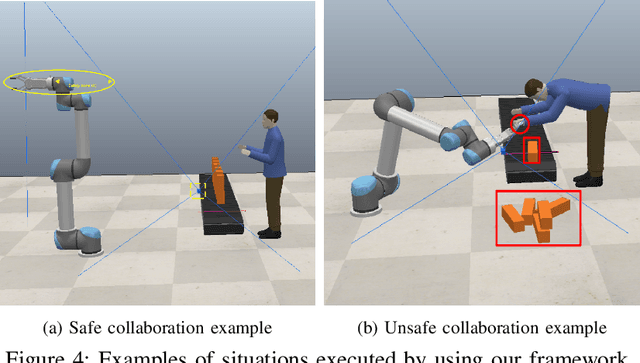
Collaborative AI systems aim at working together with humans in a shared space to achieve a common goal. This setting imposes potentially hazardous circumstances due to contacts that could harm human beings. Thus, building such systems with strong assurances of compliance with requirements domain specific standards and regulations is of greatest importance. Challenges associated with the achievement of this goal become even more severe when such systems rely on machine learning components rather than such as top-down rule-based AI. In this paper, we introduce a risk modeling approach tailored to Collaborative AI systems. The risk model includes goals, risk events and domain specific indicators that potentially expose humans to hazards. The risk model is then leveraged to drive assurance methods that feed in turn the risk model through insights extracted from run-time evidence. Our envisioned approach is described by means of a running example in the domain of Industry 4.0, where a robotic arm endowed with a visual perception component, implemented with machine learning, collaborates with a human operator for a production-relevant task.