 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRAM: Reachability Across Morphologies
Jun 08, 2026Many stages of the robotic lifecycle, from morphology synthesis to operation, rely fundamentally on the reachable workspace. However, current methods for approximating workspaces are slow, imprecise, or tied to a single morphology. We introduce Reachability Across Morphologies (RAM): a morphology-conditioned, implicit neural representation that acts as a fast, differentiable surrogate for pose reachability, generalising to unseen morphologies while inherently accounting for self-collisions. To train RAM, we publish a large-scale dataset of $3\cdot10^{10}$ samples generated solely from forward kinematics. Experiments show that our model achieves an $ F_1$-score of $86\%$ at nanosecond inference, outperforming the baseline by $14\%$ while reducing inference time by three orders of magnitude. We further demonstrate speed-ups of one and two orders of magnitude for gradient-based morphology and trajectory optimisation, respectively. Website: https://timwalter.github.io/ram.
A Design Co-Pilot for Task-Tailored Manipulators
Sep 16, 2025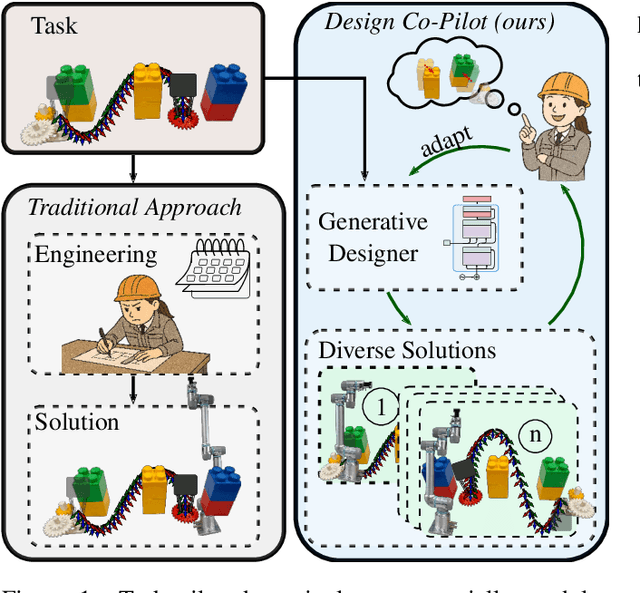
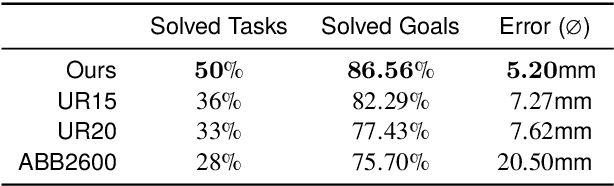
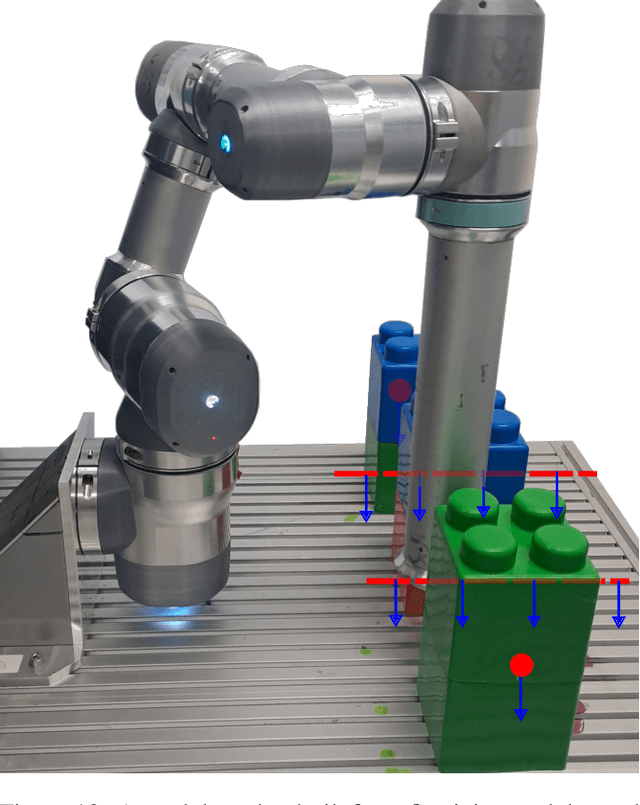
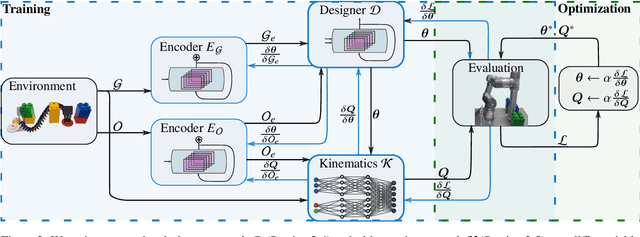
Although robotic manipulators are used in an ever-growing range of applications, robot manufacturers typically follow a ``one-fits-all'' philosophy, employing identical manipulators in various settings. This often leads to suboptimal performance, as general-purpose designs fail to exploit particularities of tasks. The development of custom, task-tailored robots is hindered by long, cost-intensive development cycles and the high cost of customized hardware. Recently, various computational design methods have been devised to overcome the bottleneck of human engineering. In addition, a surge of modular robots allows quick and economical adaptation to changing industrial settings. This work proposes an approach to automatically designing and optimizing robot morphologies tailored to a specific environment. To this end, we learn the inverse kinematics for a wide range of different manipulators. A fully differentiable framework realizes gradient-based fine-tuning of designed robots and inverse kinematics solutions. Our generative approach accelerates the generation of specialized designs from hours with optimization-based methods to seconds, serving as a design co-pilot that enables instant adaptation and effective human-AI collaboration. Numerical experiments show that our approach finds robots that can navigate cluttered environments, manipulators that perform well across a specified workspace, and can be adapted to different hardware constraints. Finally, we demonstrate the real-world applicability of our method by setting up a modular robot designed in simulation that successfully moves through an obstacle course.
Holistic Construction Automation with Modular Robots: From High-Level Task Specification to Execution
Dec 30, 2024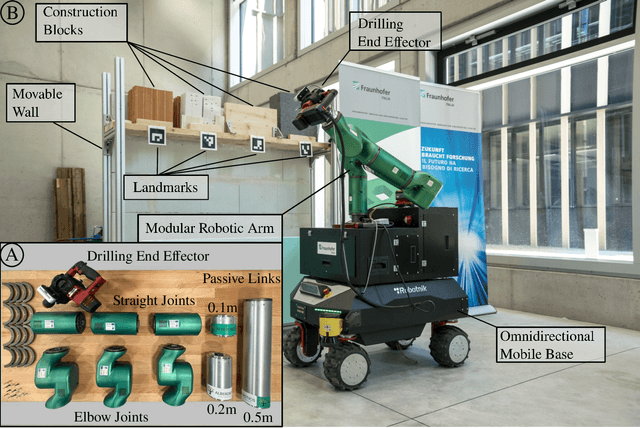
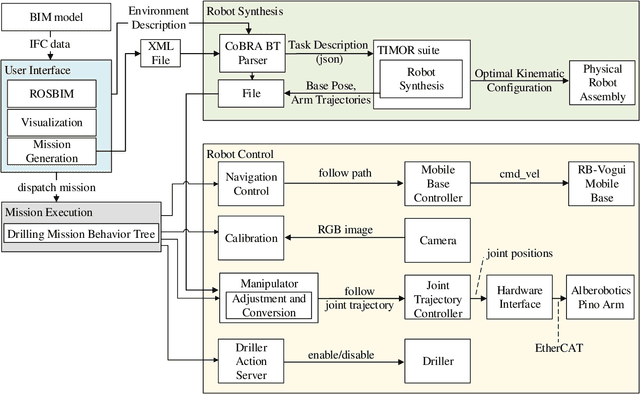
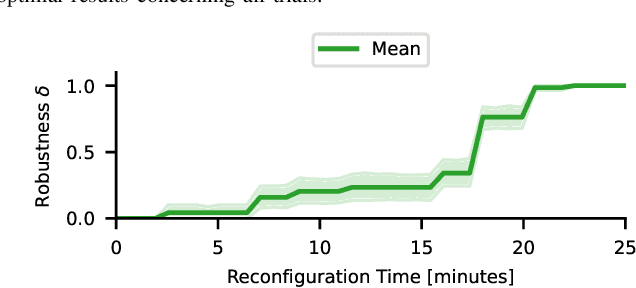
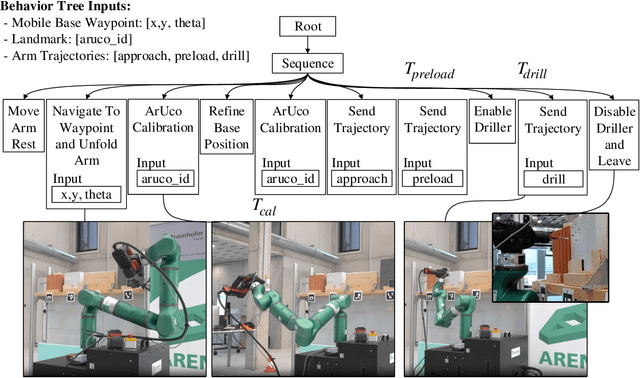
In situ robotic automation in construction is challenging due to constantly changing environments, a shortage of robotic experts, and a lack of standardized frameworks bridging robotics and construction practices. This work proposes a holistic framework for construction task specification, optimization of robot morphology, and mission execution using a mobile modular reconfigurable robot. Users can specify and monitor the desired robot behavior through a graphical interface. Our framework identifies an optimized robot morphology and enables automatic real-world execution by integrating Building Information Modelling (BIM). By leveraging modular robot components, we ensure seamless and fast adaption to the specific demands of the construction task. Experimental validation demonstrates that our approach robustly enables the autonomous execution of robotic drilling.
Optimizing Modular Robot Composition: A Lexicographic Genetic Algorithm Approach
Sep 15, 2023Industrial robots are designed as general-purpose hardware, which limits their ability to adapt to changing task requirements or environments. Modular robots, on the other hand, offer flexibility and can be easily customized to suit diverse needs. The morphology, i.e., the form and structure of a robot, significantly impacts the primary performance metrics acquisition cost, cycle time, and energy efficiency. However, identifying an optimal module composition for a specific task remains an open problem, presenting a substantial hurdle in developing task-tailored modular robots. Previous approaches either lack adequate exploration of the design space or the possibility to adapt to complex tasks. We propose combining a genetic algorithm with a lexicographic evaluation of solution candidates to overcome this problem and navigate search spaces exceeding those in prior work by magnitudes in the number of possible compositions. We demonstrate that our approach outperforms a state-of-the-art baseline and is able to synthesize modular robots for industrial tasks in cluttered environments.
Timor Python: A Toolbox for Industrial Modular Robotics
Sep 14, 2022
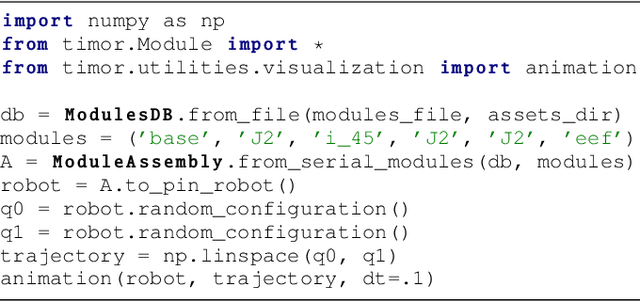
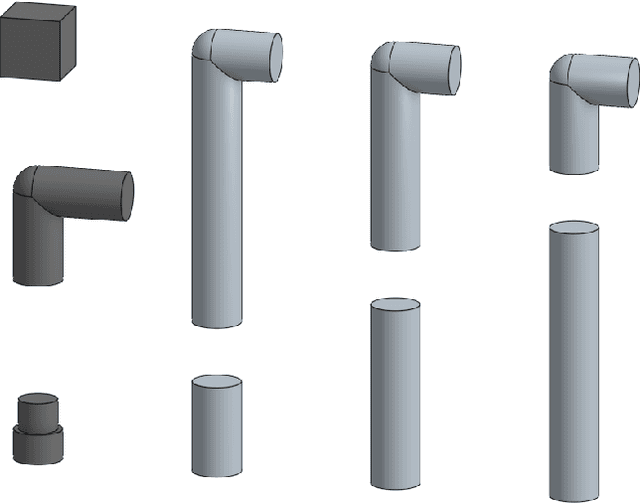

Development of controllers, novel robot kinematics, and learning-based applications of robotics today happens almost exclusively in simulation first before being implemented in the real world. In particular, Modular Reconfigurable Robots (MRRs) are an exciting innovation in industrial robotics, promising greater flexibility, improved maintainability, and cost-efficiency compared to traditional manipulators. However, there is no tool or standardized way to simulate and model assemblies of modules in the same way it has been done for robotic manipulators for decades. We introduce the Toolbox for Industrial Modular Robotics (Timor), a python toolbox to bridge this gap and integrate modular robotics in existing simulation and optimization pipelines. Our open-source library comes with various examples as well as tutorials and can easily be integrated with existing simulation tools - not least by offering URDF export of arbitrary modular robot assemblies, enabling rapid model generation.
United States Politicians' Tone Became More Negative with 2016 Primary Campaigns
Jul 17, 2022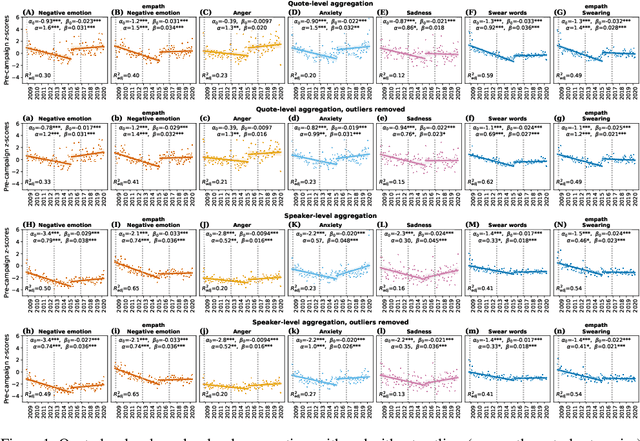
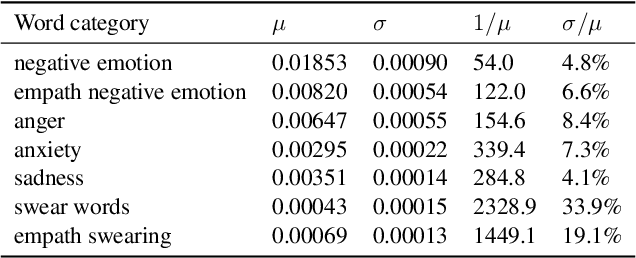
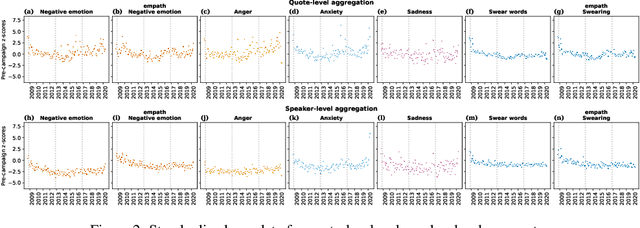
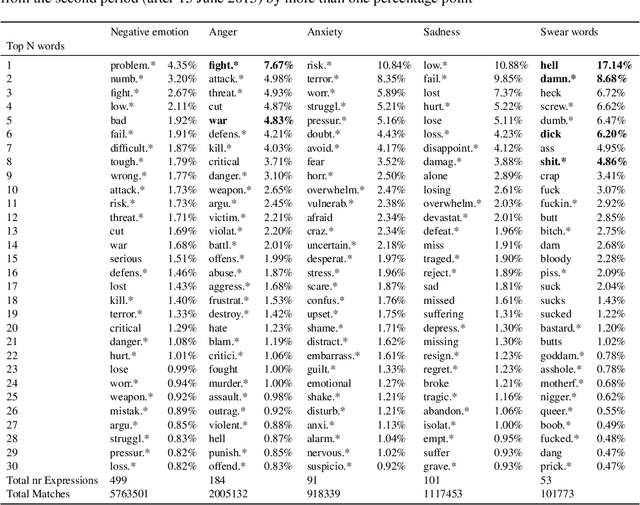
There is a widespread belief that the tone of US political language has become more negative recently, in particular when Donald Trump entered politics. At the same time, there is disagreement as to whether Trump changed or merely continued previous trends. To date, data-driven evidence regarding these questions is scarce, partly due to the difficulty of obtaining a comprehensive, longitudinal record of politicians' utterances. Here we apply psycholinguistic tools to a novel, comprehensive corpus of 24 million quotes from online news attributed to 18,627 US politicians in order to analyze how the tone of US politicians' language evolved between 2008 and 2020. We show that, whereas the frequency of negative emotion words had decreased continuously during Obama's tenure, it suddenly and lastingly increased with the 2016 primary campaigns, by 1.6 pre-campaign standard deviations, or 8% of the pre-campaign mean, in a pattern that emerges across parties. The effect size drops by 40% when omitting Trump's quotes, and by 50% when averaging over speakers rather than quotes, implying that prominent speakers, and Trump in particular, have disproportionately, though not exclusively, contributed to the rise in negative language. This work provides the first large-scale data-driven evidence of a drastic shift toward a more negative political tone following Trump's campaign start as a catalyst, with important implications for the debate about the state of US politics.
cRoK: A Composable Robotics Benchmark
Mar 17, 2022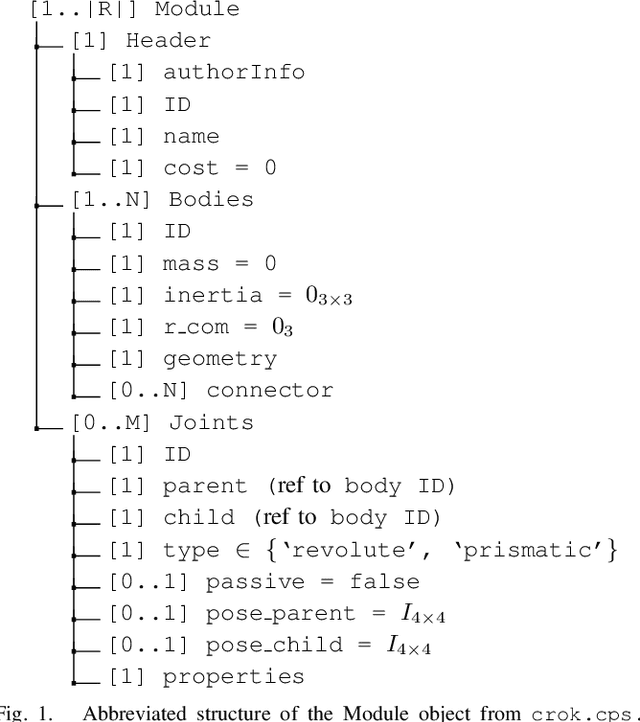

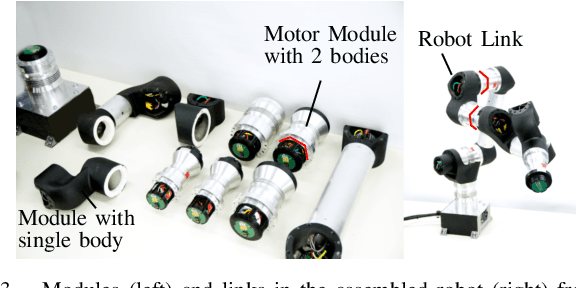
Selecting an optimal robot and configuring it for a given task is currently mostly done by human expertise or trial and error. To evaluate automatic selection and adaptation of robots to specific tasks, we introduce a benchmark suite encompassing a common format for robots, environments, and task descriptions. Our benchmark suite is especially useful for modular robots, where the creation of the robots themselves creates a host of additional parameters to optimize. The benchmark defines this optimization and facilitates the comparison of solution algorithms. All benchmarks are accessible through a website to conveniently share, reference, and compare solutions.