Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgecRoK: A Composable Robotics Benchmark
Paper and Code
Mar 17, 2022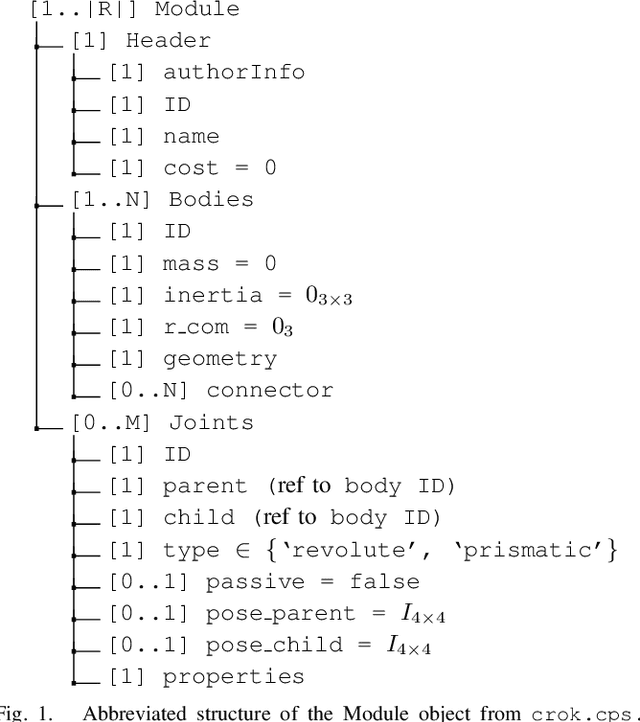

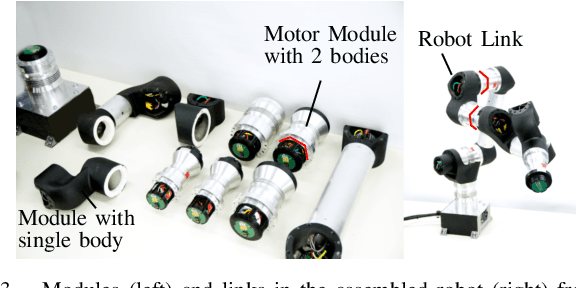
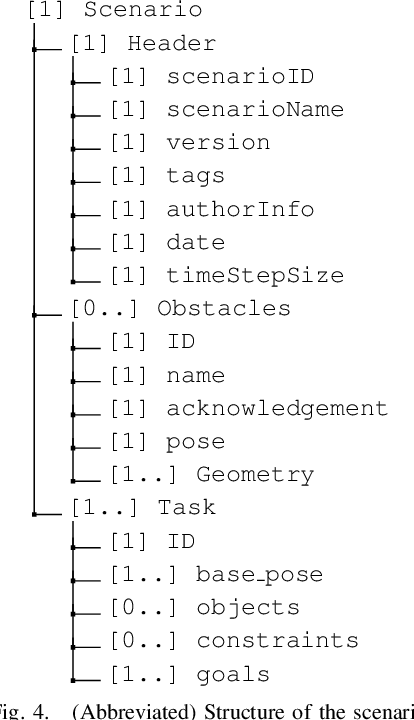
Selecting an optimal robot and configuring it for a given task is currently mostly done by human expertise or trial and error. To evaluate automatic selection and adaptation of robots to specific tasks, we introduce a benchmark suite encompassing a common format for robots, environments, and task descriptions. Our benchmark suite is especially useful for modular robots, where the creation of the robots themselves creates a host of additional parameters to optimize. The benchmark defines this optimization and facilitates the comparison of solution algorithms. All benchmarks are accessible through a website to conveniently share, reference, and compare solutions.
* Under review for IROS'22
View paper on