 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHolistic Optimization of Modular Robots
May 01, 2025Modular robots have the potential to revolutionize automation as one can optimize their composition for any given task. However, finding optimal compositions is non-trivial. In addition, different compositions require different base positions and trajectories to fully use the potential of modular robots. We address this problem holistically for the first time by jointly optimizing the composition, base placement, and trajectory, to minimize the cycle time of a given task. Our approach is evaluated on over 300 industrial benchmarks requiring point-to-point movements. Overall, we reduce cycle time by up to 25% and find feasible solutions in twice as many benchmarks compared to optimizing the module composition alone. In the first real-world validation of modular robots optimized for point-to-point movement, we find that the optimized robot is successfully deployed in nine out of ten cases in less than an hour.
Smart Placement, Faster Robots -- A Comparison of Algorithms for Robot Base-Pose Optimization
Apr 28, 2025Robotic automation is a key technology that increases the efficiency and flexibility of manufacturing processes. However, one of the challenges in deploying robots in novel environments is finding the optimal base pose for the robot, which affects its reachability and deployment cost. Yet, the existing research for automatically optimizing the base pose of robots has not been compared. We address this problem by optimizing the base pose of industrial robots with Bayesian optimization, exhaustive search, genetic algorithms, and stochastic gradient descent and find that all algorithms can reduce the cycle time for various evaluated tasks in synthetic and real-world environments. Stochastic gradient descent shows superior performance with regard to success rate solving over 90% of our real-world tasks, while genetic algorithms show the lowest final costs. All benchmarks and implemented methods are available as baselines against which novel approaches can be compared.
Timor Python: A Toolbox for Industrial Modular Robotics
Sep 14, 2022
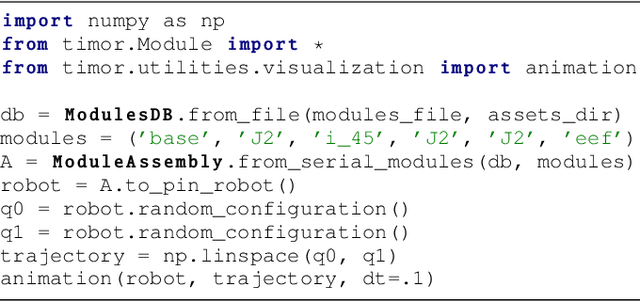
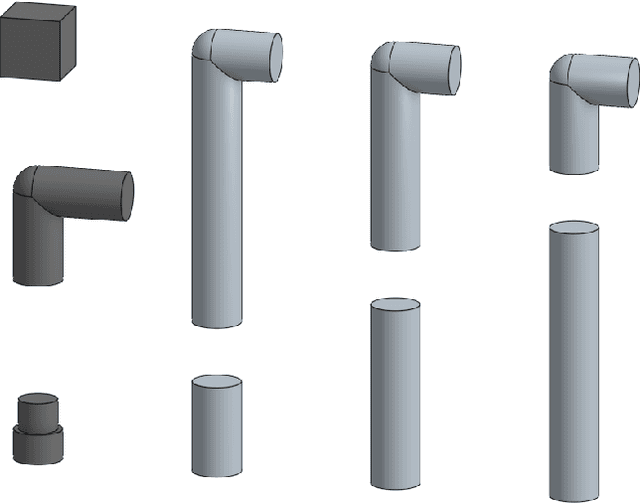

Development of controllers, novel robot kinematics, and learning-based applications of robotics today happens almost exclusively in simulation first before being implemented in the real world. In particular, Modular Reconfigurable Robots (MRRs) are an exciting innovation in industrial robotics, promising greater flexibility, improved maintainability, and cost-efficiency compared to traditional manipulators. However, there is no tool or standardized way to simulate and model assemblies of modules in the same way it has been done for robotic manipulators for decades. We introduce the Toolbox for Industrial Modular Robotics (Timor), a python toolbox to bridge this gap and integrate modular robotics in existing simulation and optimization pipelines. Our open-source library comes with various examples as well as tutorials and can easily be integrated with existing simulation tools - not least by offering URDF export of arbitrary modular robot assemblies, enabling rapid model generation.
cRoK: A Composable Robotics Benchmark
Mar 17, 2022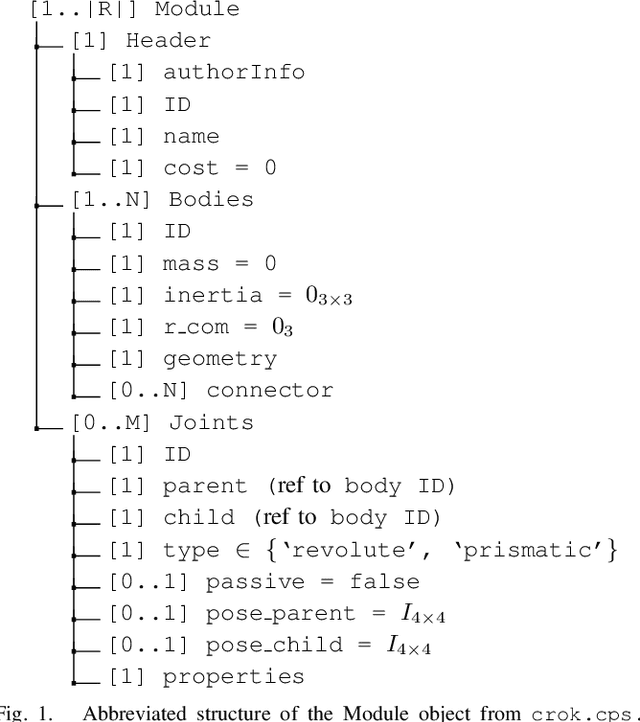

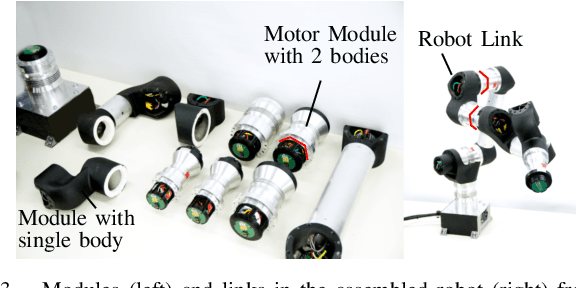
Selecting an optimal robot and configuring it for a given task is currently mostly done by human expertise or trial and error. To evaluate automatic selection and adaptation of robots to specific tasks, we introduce a benchmark suite encompassing a common format for robots, environments, and task descriptions. Our benchmark suite is especially useful for modular robots, where the creation of the robots themselves creates a host of additional parameters to optimize. The benchmark defines this optimization and facilitates the comparison of solution algorithms. All benchmarks are accessible through a website to conveniently share, reference, and compare solutions.