 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTimor Python: A Toolbox for Industrial Modular Robotics
Paper and Code

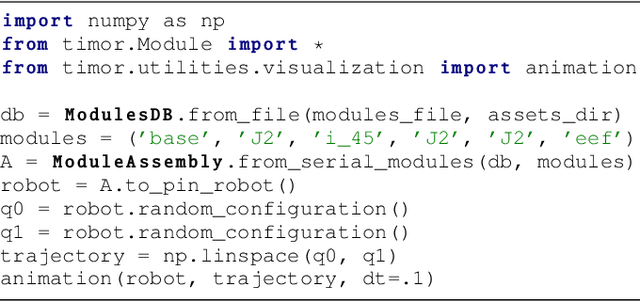
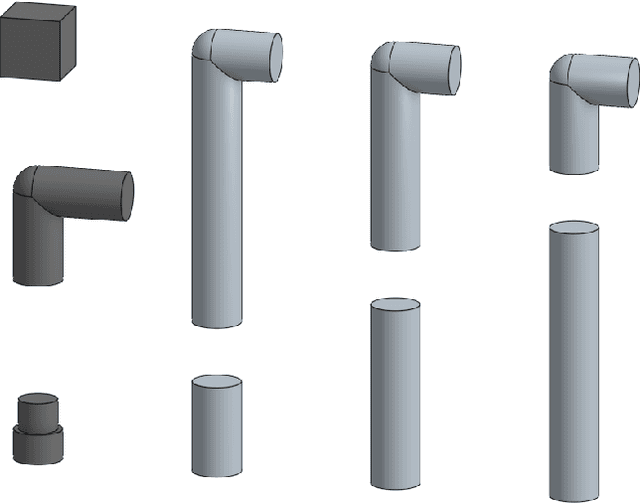

Development of controllers, novel robot kinematics, and learning-based applications of robotics today happens almost exclusively in simulation first before being implemented in the real world. In particular, Modular Reconfigurable Robots (MRRs) are an exciting innovation in industrial robotics, promising greater flexibility, improved maintainability, and cost-efficiency compared to traditional manipulators. However, there is no tool or standardized way to simulate and model assemblies of modules in the same way it has been done for robotic manipulators for decades. We introduce the Toolbox for Industrial Modular Robotics (Timor), a python toolbox to bridge this gap and integrate modular robotics in existing simulation and optimization pipelines. Our open-source library comes with various examples as well as tutorials and can easily be integrated with existing simulation tools - not least by offering URDF export of arbitrary modular robot assemblies, enabling rapid model generation.