 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe Area Signal-to-Noise Ratio: A Robust Alternative to Peak-Based SNR in Spectroscopic Analysis
Dec 23, 2025In spectroscopic analysis, the peak-based signal-to-noise ratio (pSNR) is commonly used but suffers from limitations such as sensitivity to noise spikes and reduced effectiveness for broader peaks. We introduce the area-based signal-to-noise ratio (aSNR) as a robust alternative that integrates the signal over a defined region of interest, reducing noise variance and improving detection for various lineshapes. We used Monte Carlo simulations (n=2,000 trials per condition) to test aSNR on Gaussian, Lorentzian, and Voigt lineshapes. We found that aSNR requires significantly lower amplitudes than pSNR to achieve a 50% detection probability. Receiver operating characteristic (ROC) curves show that aSNR performs better than pSNR at low amplitudes. Our results show that aSNR works especially advantageously for broad peaks and could be extended to volume-based SNR for multidimensional spectra.
NoteBar: An AI-Assisted Note-Taking System for Personal Knowledge Management
Sep 03, 2025



Note-taking is a critical practice for capturing, organizing, and reflecting on information in both academic and professional settings. The recent success of large language models has accelerated the development of AI-assisted tools, yet existing solutions often struggle with efficiency. We present NoteBar, an AI-assisted note-taking tool that leverages persona information and efficient language models to automatically organize notes into multiple categories and better support user workflows. To support research and evaluation in this space, we further introduce a novel persona-conditioned dataset of 3,173 notes and 8,494 annotated concepts across 16 MBTI personas, offering both diversity and semantic richness for downstream tasks. Finally, we demonstrate that NoteBar can be deployed in a practical and cost-effective manner, enabling interactive use without reliance on heavy infrastructure. Together, NoteBar and its accompanying dataset provide a scalable and extensible foundation for advancing AI-assisted personal knowledge management.
Plenoxels: Radiance Fields without Neural Networks
Dec 09, 2021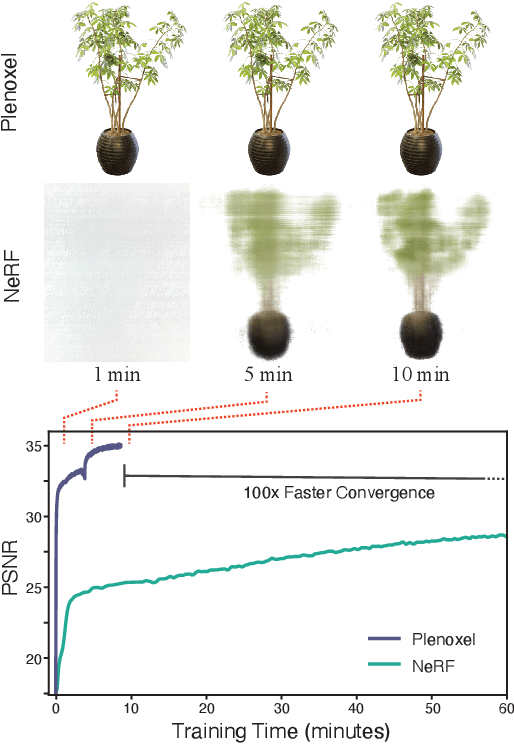
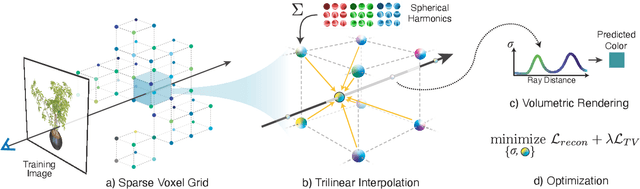
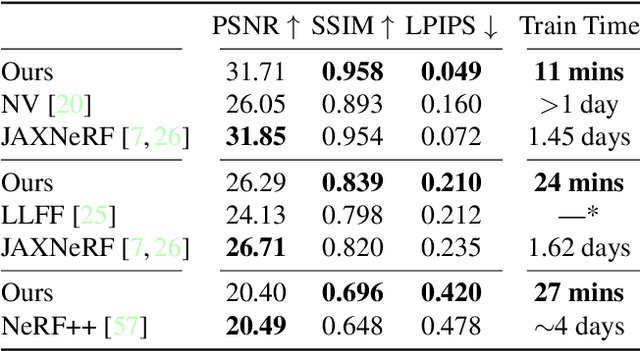
We introduce Plenoxels (plenoptic voxels), a system for photorealistic view synthesis. Plenoxels represent a scene as a sparse 3D grid with spherical harmonics. This representation can be optimized from calibrated images via gradient methods and regularization without any neural components. On standard, benchmark tasks, Plenoxels are optimized two orders of magnitude faster than Neural Radiance Fields with no loss in visual quality.
PlenOctrees for Real-time Rendering of Neural Radiance Fields
Mar 25, 2021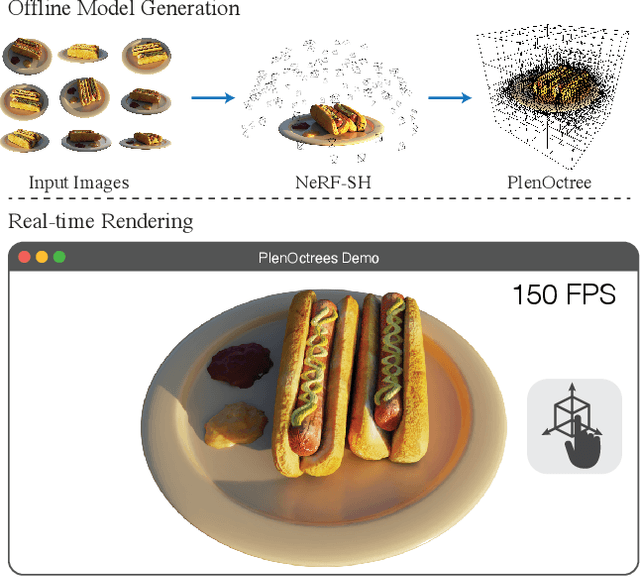
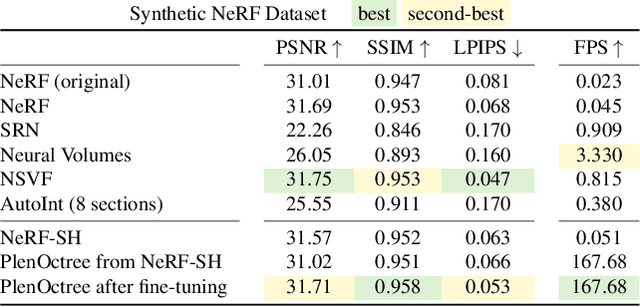
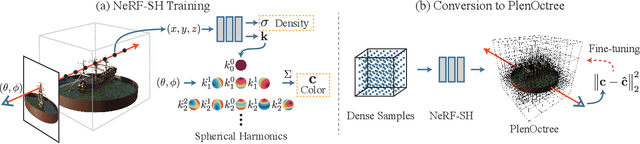
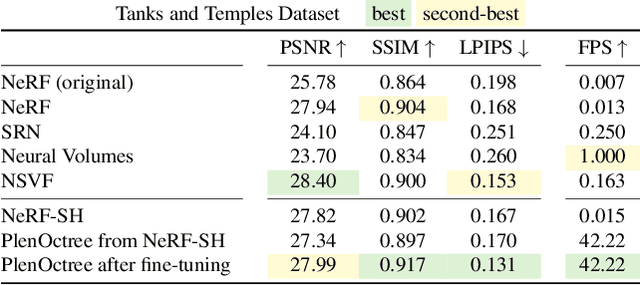
We introduce a method to render Neural Radiance Fields (NeRFs) in real time using PlenOctrees, an octree-based 3D representation which supports view-dependent effects. Our method can render 800x800 images at more than 150 FPS, which is over 3000 times faster than conventional NeRFs. We do so without sacrificing quality while preserving the ability of NeRFs to perform free-viewpoint rendering of scenes with arbitrary geometry and view-dependent effects. Real-time performance is achieved by pre-tabulating the NeRF into a PlenOctree. In order to preserve view-dependent effects such as specularities, we factorize the appearance via closed-form spherical basis functions. Specifically, we show that it is possible to train NeRFs to predict a spherical harmonic representation of radiance, removing the viewing direction as an input to the neural network. Furthermore, we show that PlenOctrees can be directly optimized to further minimize the reconstruction loss, which leads to equal or better quality compared to competing methods. Moreover, this octree optimization step can be used to reduce the training time, as we no longer need to wait for the NeRF training to converge fully. Our real-time neural rendering approach may potentially enable new applications such as 6-DOF industrial and product visualizations, as well as next generation AR/VR systems. PlenOctrees are amenable to in-browser rendering as well; please visit the project page for the interactive online demo, as well as video and code: https://alexyu.net/plenoctrees
Deluca -- A Differentiable Control Library: Environments, Methods, and Benchmarking
Feb 19, 2021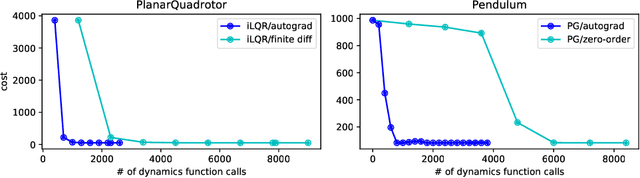

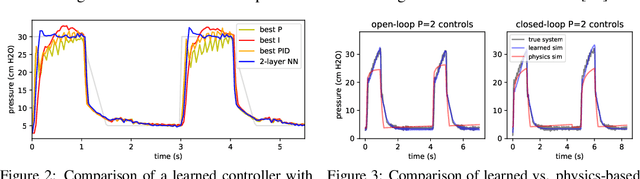
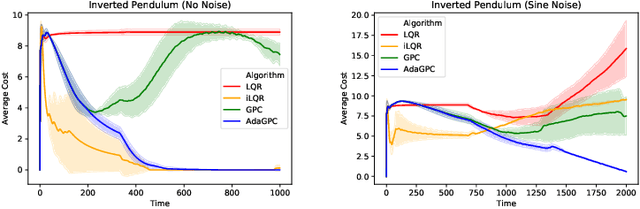
We present an open-source library of natively differentiable physics and robotics environments, accompanied by gradient-based control methods and a benchmark-ing suite. The introduced environments allow auto-differentiation through the simulation dynamics, and thereby permit fast training of controllers. The library features several popular environments, including classical control settings from OpenAI Gym. We also provide a novel differentiable environment, based on deep neural networks, that simulates medical ventilation. We give several use-cases of new scientific results obtained using the library. This includes a medical ventilator simulator and controller, an adaptive control method for time-varying linear dynamical systems, and new gradient-based methods for control of linear dynamical systems with adversarial perturbations.
pixelNeRF: Neural Radiance Fields from One or Few Images
Dec 03, 2020
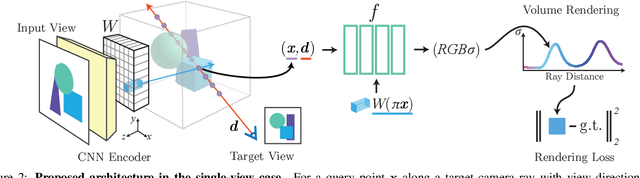
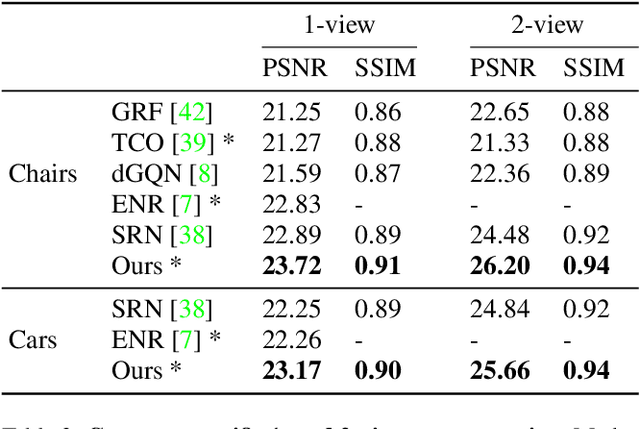

We propose pixelNeRF, a learning framework that predicts a continuous neural scene representation conditioned on one or few input images. The existing approach for constructing neural radiance fields involves optimizing the representation to every scene independently, requiring many calibrated views and significant compute time. We take a step towards resolving these shortcomings by introducing an architecture that conditions a NeRF on image inputs in a fully convolutional manner. This allows the network to be trained across multiple scenes to learn a scene prior, enabling it to perform novel view synthesis in a feed-forward manner from a sparse set of views (as few as one). Leveraging the volume rendering approach of NeRF, our model can be trained directly from images with no explicit 3D supervision. We conduct extensive experiments on ShapeNet benchmarks for single image novel view synthesis tasks with held-out objects as well as entire unseen categories. We further demonstrate the flexibility of pixelNeRF by demonstrating it on multi-object ShapeNet scenes and real scenes from the DTU dataset. In all cases, pixelNeRF outperforms current state-of-the-art baselines for novel view synthesis and single image 3D reconstruction. For the video and code, please visit the project website: https://alexyu.net/pixelnerf