 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeModel Predictive Control for Aggressive Driving Over Uneven Terrain
Nov 21, 2023



Terrain traversability in off-road autonomy has traditionally relied on semantic classification or resource-intensive dynamics models to capture vehicle-terrain interactions. However, our experiences in the development of a high-speed off-road platform have revealed several critical challenges that are not adequately addressed by current methods at our operating speeds of 7--10 m/s. This study focuses particularly on uneven terrain geometries such as hills, banks, and ditches. These common high-risk geometries are capable of disabling the vehicle and causing severe passenger injuries if poorly traversed. We introduce a physics-based framework for identifying traversability constraints on terrain dynamics. Using this framework, we then derive two fundamental constraints, with a primary focus on mitigating rollover and ditch-crossing failures. In addition, we present the design of our planning and control system, which uses Model Predictive Control (MPC) and a low-level controller to enable the fast and efficient computation of these constraints to meet the demands of our aggressive driving. Through real-world experimentation and traversal of hills and ditches, our approach is tested and benchmarked against a human expert. These results demonstrate that our approach captures fundamental elements of safe and aggressive control on these terrain features.
Deep Model Predictive Optimization
Oct 06, 2023



A major challenge in robotics is to design robust policies which enable complex and agile behaviors in the real world. On one end of the spectrum, we have model-free reinforcement learning (MFRL), which is incredibly flexible and general but often results in brittle policies. In contrast, model predictive control (MPC) continually re-plans at each time step to remain robust to perturbations and model inaccuracies. However, despite its real-world successes, MPC often under-performs the optimal strategy. This is due to model quality, myopic behavior from short planning horizons, and approximations due to computational constraints. And even with a perfect model and enough compute, MPC can get stuck in bad local optima, depending heavily on the quality of the optimization algorithm. To this end, we propose Deep Model Predictive Optimization (DMPO), which learns the inner-loop of an MPC optimization algorithm directly via experience, specifically tailored to the needs of the control problem. We evaluate DMPO on a real quadrotor agile trajectory tracking task, on which it improves performance over a baseline MPC algorithm for a given computational budget. It can outperform the best MPC algorithm by up to 27% with fewer samples and an end-to-end policy trained with MFRL by 19%. Moreover, because DMPO requires fewer samples, it can also achieve these benefits with 4.3X less memory. When we subject the quadrotor to turbulent wind fields with an attached drag plate, DMPO can adapt zero-shot while still outperforming all baselines. Additional results can be found at https://tinyurl.com/mr2ywmnw.
Fast and Agile Vision-Based Flight with Teleoperation and Collision Avoidance on a Multirotor
May 31, 2019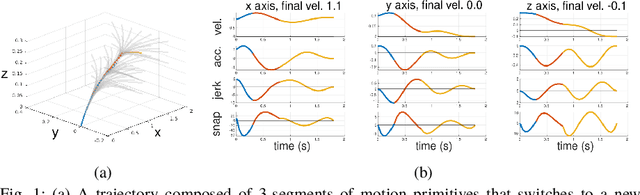
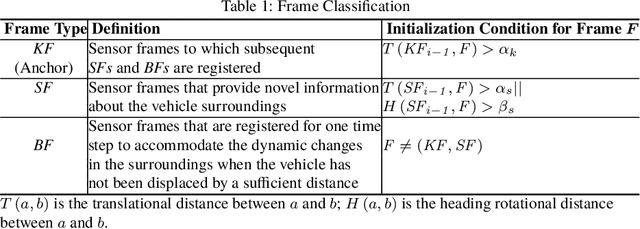
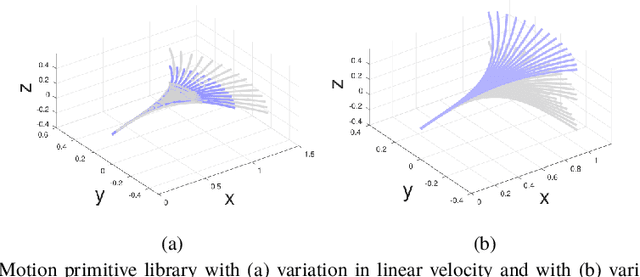
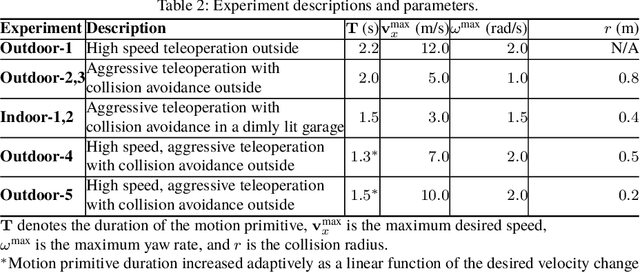
We present a multirotor architecture capable of aggressive autonomous flight and collision-free teleoperation in unstructured, GPS-denied environments. The proposed system enables aggressive and safe autonomous flight around clutter by integrating recent advancements in visual-inertial state estimation and teleoperation. Our teleoperation framework maps user inputs onto smooth and dynamically feasible motion primitives. Collision-free trajectories are ensured by querying a locally consistent map that is incrementally constructed from forward-facing depth observations. Our system enables a non-expert operator to safely navigate a multirotor around obstacles at speeds of 10 m/s. We achieve autonomous flights at speeds exceeding 12 m/s and accelerations exceeding 12 m/s^2 in a series of outdoor field experiments that validate our approach.