 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFast and Agile Vision-Based Flight with Teleoperation and Collision Avoidance on a Multirotor
May 31, 2019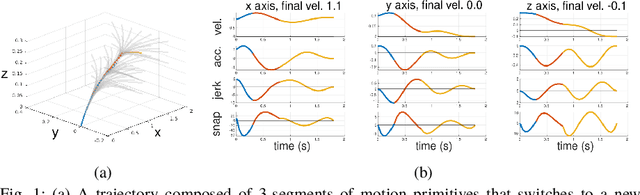
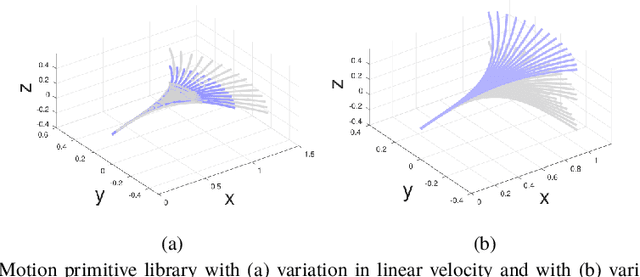
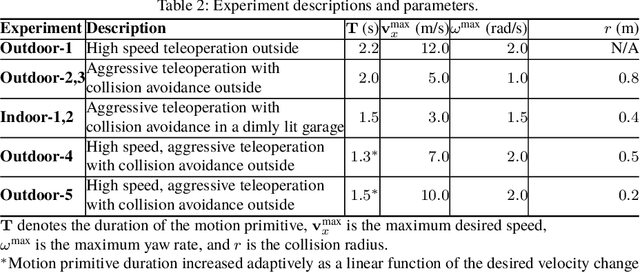
We present a multirotor architecture capable of aggressive autonomous flight and collision-free teleoperation in unstructured, GPS-denied environments. The proposed system enables aggressive and safe autonomous flight around clutter by integrating recent advancements in visual-inertial state estimation and teleoperation. Our teleoperation framework maps user inputs onto smooth and dynamically feasible motion primitives. Collision-free trajectories are ensured by querying a locally consistent map that is incrementally constructed from forward-facing depth observations. Our system enables a non-expert operator to safely navigate a multirotor around obstacles at speeds of 10 m/s. We achieve autonomous flights at speeds exceeding 12 m/s and accelerations exceeding 12 m/s^2 in a series of outdoor field experiments that validate our approach.
Fast Monte-Carlo Localization on Aerial Vehicles using Approximate Continuous Belief Representations
Mar 29, 2018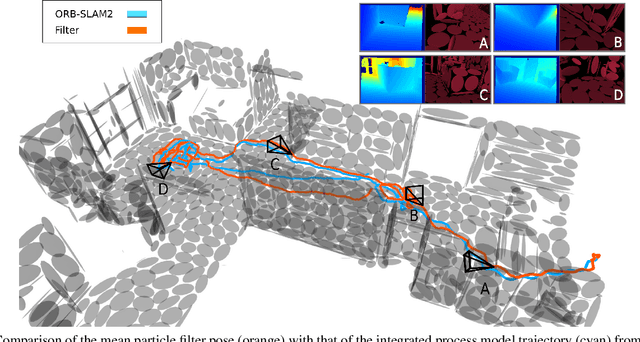
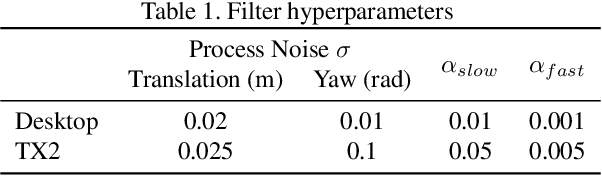
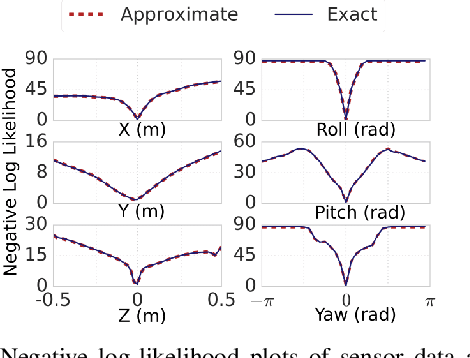
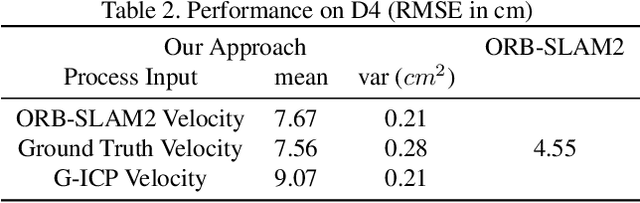
Size, weight, and power constrained platforms impose constraints on computational resources that introduce unique challenges in implementing localization algorithms. We present a framework to perform fast localization on such platforms enabled by the compressive capabilities of Gaussian Mixture Model representations of point cloud data. Given raw structural data from a depth sensor and pitch and roll estimates from an on-board attitude reference system, a multi-hypothesis particle filter localizes the vehicle by exploiting the likelihood of the data originating from the mixture model. We demonstrate analysis of this likelihood in the vicinity of the ground truth pose and detail its utilization in a particle filter-based vehicle localization strategy, and later present results of real-time implementations on a desktop system and an off-the-shelf embedded platform that outperform localization results from running a state-of-the-art algorithm on the same environment.