 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFast Monte-Carlo Localization on Aerial Vehicles using Approximate Continuous Belief Representations
Paper and Code
Mar 29, 2018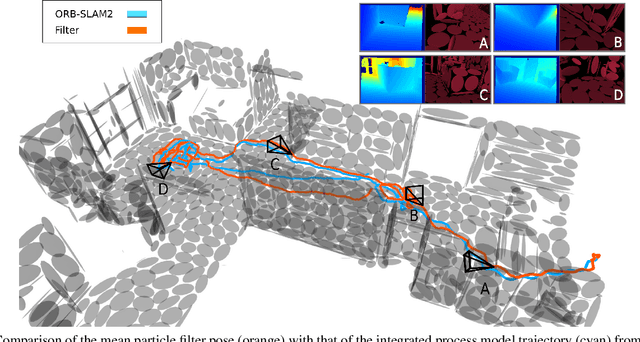
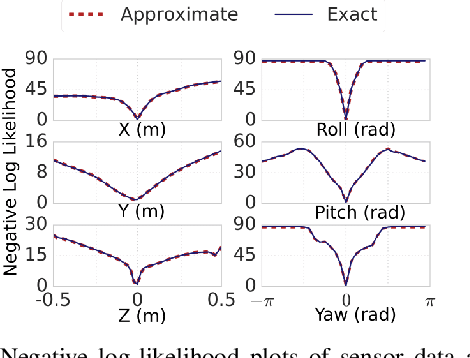
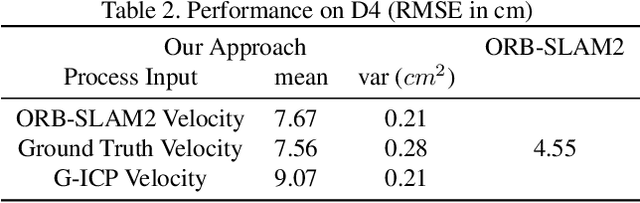
Size, weight, and power constrained platforms impose constraints on computational resources that introduce unique challenges in implementing localization algorithms. We present a framework to perform fast localization on such platforms enabled by the compressive capabilities of Gaussian Mixture Model representations of point cloud data. Given raw structural data from a depth sensor and pitch and roll estimates from an on-board attitude reference system, a multi-hypothesis particle filter localizes the vehicle by exploiting the likelihood of the data originating from the mixture model. We demonstrate analysis of this likelihood in the vicinity of the ground truth pose and detail its utilization in a particle filter-based vehicle localization strategy, and later present results of real-time implementations on a desktop system and an off-the-shelf embedded platform that outperform localization results from running a state-of-the-art algorithm on the same environment.