 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAPEX-SWE
Jan 13, 2026We introduce the AI Productivity Index for Software Engineering (APEX-SWE), a benchmark for assessing whether frontier AI models can execute economically valuable software engineering work. Unlike existing evaluations that focus on narrow, well-defined tasks, APEX-SWE assesses two novel task types that reflect real-world software engineering work: (1) Integration tasks (n=100), which require constructing end-to-end systems across heterogeneous cloud primitives, business applications, and infrastructure-as-code services, and (2) Observability tasks (n=100), which require debugging production failures using telemetry signals such as logs and dashboards, as well as unstructured context. We evaluated eight frontier models on APEX-SWE. Gemini 3 Pro (Thinking = High) performs best, with a Pass@1 score of 25\%. Our analysis shows that strong performance is primarily driven by epistemic reasoning, defined as the ability to distinguish between assumptions and verified facts, combined with agency to resolve uncertainty prior to acting. We open-source the APEX-SWE evaluation harness and a dev set (n=50).
TD-EVAL: Revisiting Task-Oriented Dialogue Evaluation by Combining Turn-Level Precision with Dialogue-Level Comparisons
Apr 28, 2025



Task-oriented dialogue (TOD) systems are experiencing a revolution driven by Large Language Models (LLMs), yet the evaluation methodologies for these systems remain insufficient for their growing sophistication. While traditional automatic metrics effectively assessed earlier modular systems, they focus solely on the dialogue level and cannot detect critical intermediate errors that can arise during user-agent interactions. In this paper, we introduce TD-EVAL (Turn and Dialogue-level Evaluation), a two-step evaluation framework that unifies fine-grained turn-level analysis with holistic dialogue-level comparisons. At turn level, we evaluate each response along three TOD-specific dimensions: conversation cohesion, backend knowledge consistency, and policy compliance. Meanwhile, we design TOD Agent Arena that uses pairwise comparisons to provide a measure of dialogue-level quality. Through experiments on MultiWOZ 2.4 and {\tau}-Bench, we demonstrate that TD-EVAL effectively identifies the conversational errors that conventional metrics miss. Furthermore, TD-EVAL exhibits better alignment with human judgments than traditional and LLM-based metrics. These findings demonstrate that TD-EVAL introduces a new paradigm for TOD system evaluation, efficiently assessing both turn and system levels with a plug-and-play framework for future research.
Can a Single Model Master Both Multi-turn Conversations and Tool Use? CALM: A Unified Conversational Agentic Language Model
Feb 12, 2025



Large Language Models (LLMs) with API-calling capabilities enabled building effective Language Agents (LA), while also revolutionizing the conventional task-oriented dialogue (TOD) paradigm. However, current approaches face a critical dilemma: TOD systems are often trained on a limited set of target APIs, requiring new data to maintain their quality when interfacing with new services, while LAs are not trained to maintain user intent over multi-turn conversations. Because both robust multi-turn management and advanced function calling are crucial for effective conversational agents, we evaluate these skills on three popular benchmarks: MultiWOZ 2.4 (TOD), BFCL V3 (LA), and API-Bank (LA), and our analyses reveal that specialized approaches excel in one domain but underperform in the other. To bridge this chasm, we introduce CALM (Conversational Agentic Language Model), a unified approach that integrates both conversational and agentic capabilities. We created CALM-IT, a carefully constructed multi-task dataset that interleave multi-turn ReAct reasoning with complex API usage. Using CALM-IT, we train three models CALM 8B, CALM 70B, and CALM 405B, which outperform top domain-specific models, including GPT-4o, across all three benchmarks.
The Evolution of RWKV: Advancements in Efficient Language Modeling
Nov 05, 2024This paper reviews the development of the Receptance Weighted Key Value (RWKV) architecture, emphasizing its advancements in efficient language modeling. RWKV combines the training efficiency of Transformers with the inference efficiency of RNNs through a novel linear attention mechanism. We examine its core innovations, adaptations across various domains, and performance advantages over traditional models. The paper also discusses challenges and future directions for RWKV as a versatile architecture in deep learning.
Task-relevant Representation Learning for Networked Robotic Perception
Nov 06, 2020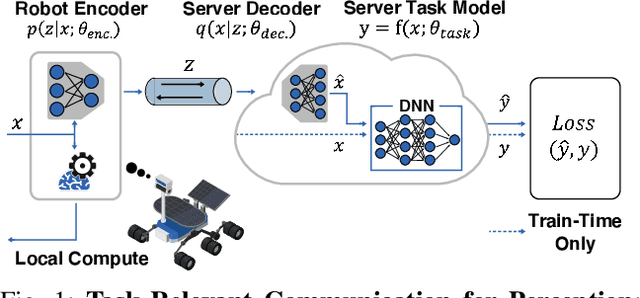
Today, even the most compute-and-power constrained robots can measure complex, high data-rate video and LIDAR sensory streams. Often, such robots, ranging from low-power drones to space and subterranean rovers, need to transmit high-bitrate sensory data to a remote compute server if they are uncertain or cannot scalably run complex perception or mapping tasks locally. However, today's representations for sensory data are mostly designed for human, not robotic, perception and thus often waste precious compute or wireless network resources to transmit unimportant parts of a scene that are unnecessary for a high-level robotic task. This paper presents an algorithm to learn task-relevant representations of sensory data that are co-designed with a pre-trained robotic perception model's ultimate objective. Our algorithm aggressively compresses robotic sensory data by up to 11x more than competing methods. Further, it achieves high accuracy and robust generalization on diverse tasks including Mars terrain classification with low-power deep learning accelerators, neural motion planning, and environmental timeseries classification.