 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDo Visual Imaginations Improve Vision-and-Language Navigation Agents?
Mar 20, 2025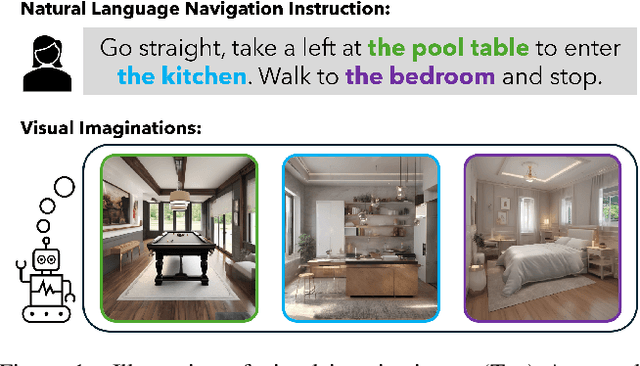
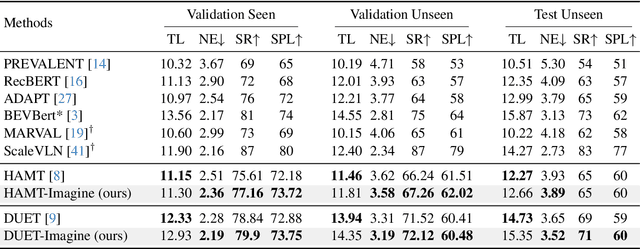

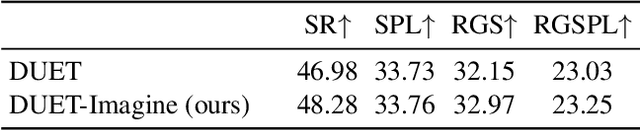
Vision-and-Language Navigation (VLN) agents are tasked with navigating an unseen environment using natural language instructions. In this work, we study if visual representations of sub-goals implied by the instructions can serve as navigational cues and lead to increased navigation performance. To synthesize these visual representations or imaginations, we leverage a text-to-image diffusion model on landmark references contained in segmented instructions. These imaginations are provided to VLN agents as an added modality to act as landmark cues and an auxiliary loss is added to explicitly encourage relating these with their corresponding referring expressions. Our findings reveal an increase in success rate (SR) of around 1 point and up to 0.5 points in success scaled by inverse path length (SPL) across agents. These results suggest that the proposed approach reinforces visual understanding compared to relying on language instructions alone. Code and data for our work can be found at https://www.akhilperincherry.com/VLN-Imagine-website/.
Geometry-guided Cross-view Diffusion for One-to-many Cross-view Image Synthesis
Dec 04, 2024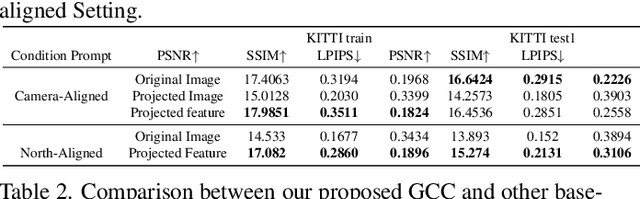
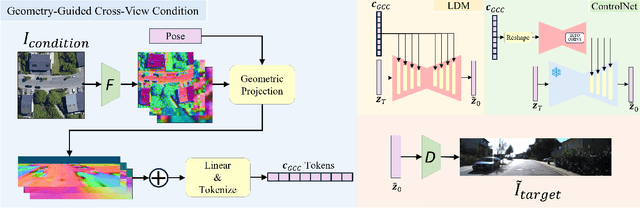
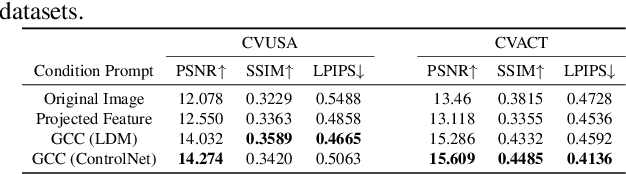
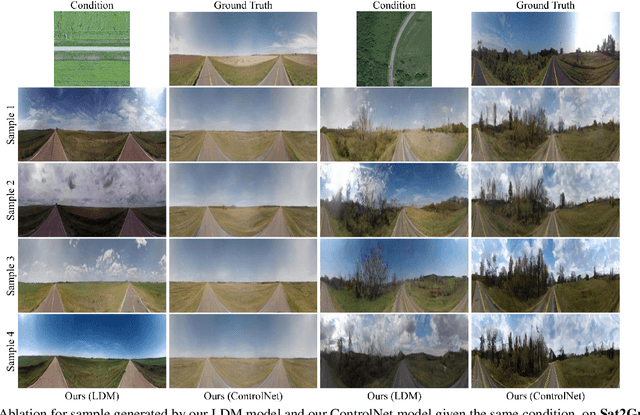
This paper presents a novel approach for cross-view synthesis aimed at generating plausible ground-level images from corresponding satellite imagery or vice versa. We refer to these tasks as satellite-to-ground (Sat2Grd) and ground-to-satellite (Grd2Sat) synthesis, respectively. Unlike previous works that typically focus on one-to-one generation, producing a single output image from a single input image, our approach acknowledges the inherent one-to-many nature of the problem. This recognition stems from the challenges posed by differences in illumination, weather conditions, and occlusions between the two views. To effectively model this uncertainty, we leverage recent advancements in diffusion models. Specifically, we exploit random Gaussian noise to represent the diverse possibilities learnt from the target view data. We introduce a Geometry-guided Cross-view Condition (GCC) strategy to establish explicit geometric correspondences between satellite and street-view features. This enables us to resolve the geometry ambiguity introduced by camera pose between image pairs, boosting the performance of cross-view image synthesis. Through extensive quantitative and qualitative analyses on three benchmark cross-view datasets, we demonstrate the superiority of our proposed geometry-guided cross-view condition over baseline methods, including recent state-of-the-art approaches in cross-view image synthesis. Our method generates images of higher quality, fidelity, and diversity than other state-of-the-art approaches.
Weakly-supervised Camera Localization by Ground-to-satellite Image Registration
Sep 10, 2024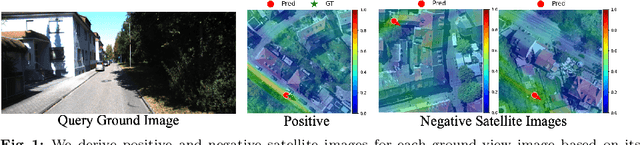
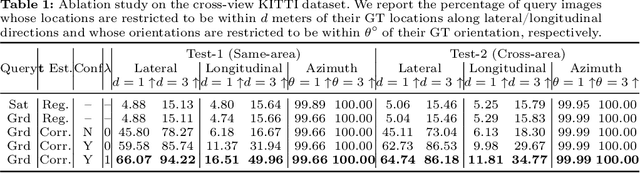
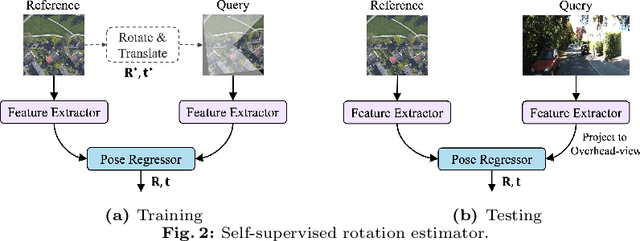

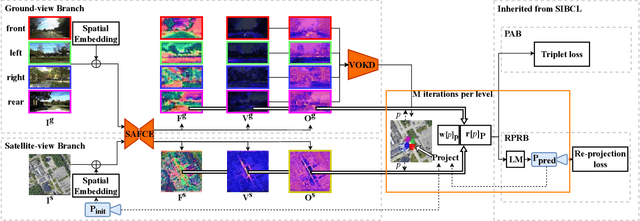
The ground-to-satellite image matching/retrieval was initially proposed for city-scale ground camera localization. This work addresses the problem of improving camera pose accuracy by ground-to-satellite image matching after a coarse location and orientation have been obtained, either from the city-scale retrieval or from consumer-level GPS and compass sensors. Existing learning-based methods for solving this task require accurate GPS labels of ground images for network training. However, obtaining such accurate GPS labels is difficult, often requiring an expensive {\color{black}Real Time Kinematics (RTK)} setup and suffering from signal occlusion, multi-path signal disruptions, \etc. To alleviate this issue, this paper proposes a weakly supervised learning strategy for ground-to-satellite image registration when only noisy pose labels for ground images are available for network training. It derives positive and negative satellite images for each ground image and leverages contrastive learning to learn feature representations for ground and satellite images useful for translation estimation. We also propose a self-supervision strategy for cross-view image relative rotation estimation, which trains the network by creating pseudo query and reference image pairs. Experimental results show that our weakly supervised learning strategy achieves the best performance on cross-area evaluation compared to recent state-of-the-art methods that are reliant on accurate pose labels for supervision.
Increasing SLAM Pose Accuracy by Ground-to-Satellite Image Registration
Apr 14, 2024Vision-based localization for autonomous driving has been of great interest among researchers. When a pre-built 3D map is not available, the techniques of visual simultaneous localization and mapping (SLAM) are typically adopted. Due to error accumulation, visual SLAM (vSLAM) usually suffers from long-term drift. This paper proposes a framework to increase the localization accuracy by fusing the vSLAM with a deep-learning-based ground-to-satellite (G2S) image registration method. In this framework, a coarse (spatial correlation bound check) to fine (visual odometry consistency check) method is designed to select the valid G2S prediction. The selected prediction is then fused with the SLAM measurement by solving a scaled pose graph problem. To further increase the localization accuracy, we provide an iterative trajectory fusion pipeline. The proposed framework is evaluated on two well-known autonomous driving datasets, and the results demonstrate the accuracy and robustness in terms of vehicle localization.
View Consistent Purification for Accurate Cross-View Localization
Aug 16, 2023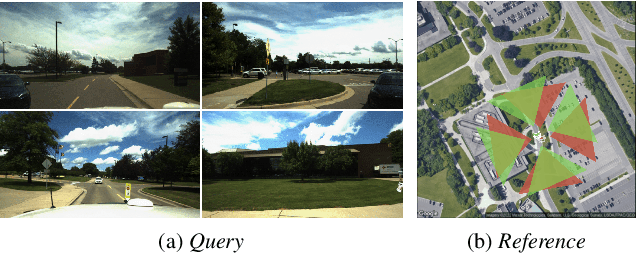


This paper proposes a fine-grained self-localization method for outdoor robotics that utilizes a flexible number of onboard cameras and readily accessible satellite images. The proposed method addresses limitations in existing cross-view localization methods that struggle to handle noise sources such as moving objects and seasonal variations. It is the first sparse visual-only method that enhances perception in dynamic environments by detecting view-consistent key points and their corresponding deep features from ground and satellite views, while removing off-the-ground objects and establishing homography transformation between the two views. Moreover, the proposed method incorporates a spatial embedding approach that leverages camera intrinsic and extrinsic information to reduce the ambiguity of purely visual matching, leading to improved feature matching and overall pose estimation accuracy. The method exhibits strong generalization and is robust to environmental changes, requiring only geo-poses as ground truth. Extensive experiments on the KITTI and Ford Multi-AV Seasonal datasets demonstrate that our proposed method outperforms existing state-of-the-art methods, achieving median spatial accuracy errors below $0.5$ meters along the lateral and longitudinal directions, and a median orientation accuracy error below 2 degrees.
Boosting 3-DoF Ground-to-Satellite Camera Localization Accuracy via Geometry-Guided Cross-View Transformer
Jul 20, 2023



Image retrieval-based cross-view localization methods often lead to very coarse camera pose estimation, due to the limited sampling density of the database satellite images. In this paper, we propose a method to increase the accuracy of a ground camera's location and orientation by estimating the relative rotation and translation between the ground-level image and its matched/retrieved satellite image. Our approach designs a geometry-guided cross-view transformer that combines the benefits of conventional geometry and learnable cross-view transformers to map the ground-view observations to an overhead view. Given the synthesized overhead view and observed satellite feature maps, we construct a neural pose optimizer with strong global information embedding ability to estimate the relative rotation between them. After aligning their rotations, we develop an uncertainty-guided spatial correlation to generate a probability map of the vehicle locations, from which the relative translation can be determined. Experimental results demonstrate that our method significantly outperforms the state-of-the-art. Notably, the likelihood of restricting the vehicle lateral pose to be within 1m of its Ground Truth (GT) value on the cross-view KITTI dataset has been improved from $35.54\%$ to $76.44\%$, and the likelihood of restricting the vehicle orientation to be within $1^{\circ}$ of its GT value has been improved from $19.64\%$ to $99.10\%$.