 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFrom Vague Instructions to Task Plans: A Feedback-Driven HRC Task Planning Framework based on LLMs
Mar 02, 2025



Recent advances in large language models (LLMs) have demonstrated their potential as planners in human-robot collaboration (HRC) scenarios, offering a promising alternative to traditional planning methods. LLMs, which can generate structured plans by reasoning over natural language inputs, have the ability to generalize across diverse tasks and adapt to human instructions. This paper investigates the potential of LLMs to facilitate planning in the context of human-robot collaborative tasks, with a focus on their ability to reason from high-level, vague human inputs, and fine-tune plans based on real-time feedback. We propose a novel hybrid framework that combines LLMs with human feedback to create dynamic, context-aware task plans. Our work also highlights how a single, concise prompt can be used for a wide range of tasks and environments, overcoming the limitations of long, detailed structured prompts typically used in prior studies. By integrating user preferences into the planning loop, we ensure that the generated plans are not only effective but aligned with human intentions.
Group-Control Motion Planning Framework for Microrobot Swarms in a Global Field
Jun 19, 2024



This paper investigates how group-control can be effectively used for motion planning for microrobot swarms in a global field. We prove that Small-Time Local Controllability (STLC) in robot positions is achievable through group-control, with the minimum number of groups required for STLC being $\log_2(n + 2) + 1$ for $n$ robots. We then discuss the complexity trade-offs between control and motion planning. We show how motion planning can be simplified if appropriate primitives can be achieved through more complex control actions. We identify motion planning problems that balance the number of robot groups and motion primitives with planning complexity. Various instantiations of these motion planning problems are explored, with simulations to demonstrate the effectiveness of group-control.
Proactive Robot Control for Collaborative Manipulation Using Human Intent
Nov 06, 2023



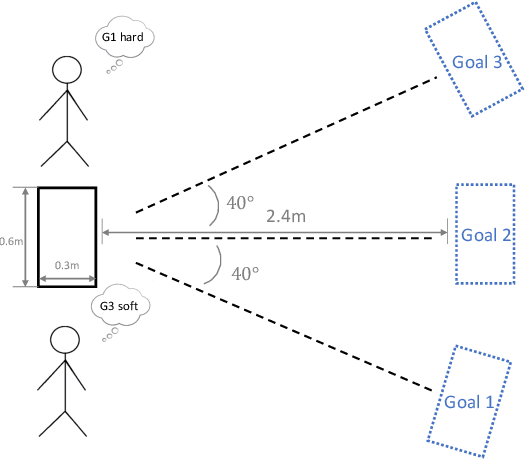
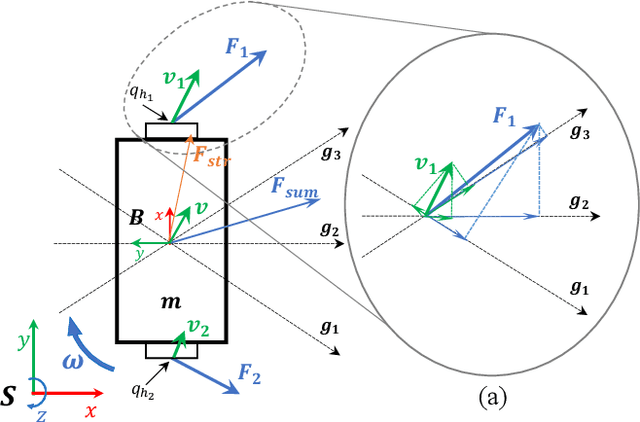
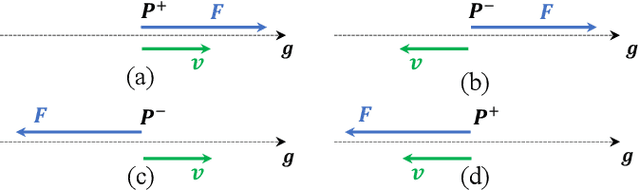
Collaborative manipulation task often requires negotiation using explicit or implicit communication. An important example is determining where to move when the goal destination is not uniquely specified, and who should lead the motion. This work is motivated by the ability of humans to communicate the desired destination of motion through back-and-forth force exchanges. Inherent to these exchanges is also the ability to dynamically assign a role to each participant, either taking the initiative or deferring to the partner's lead. In this paper, we propose a hierarchical robot control framework that emulates human behavior in communicating a motion destination to a human collaborator and in responding to their actions. At the top level, the controller consists of a set of finite-state machines corresponding to different levels of commitment of the robot to its desired goal configuration. The control architecture is loosely based on the human strategy observed in the human-human experiments, and the key component is a real-time intent recognizer that helps the robot respond to human actions. We describe the details of the control framework, and feature engineering and training process of the intent recognition. The proposed controller was implemented on a UR10e robot (Universal Robots) and evaluated through human studies. The experiments show that the robot correctly recognizes and responds to human input, communicates its intent clearly, and resolves conflict. We report success rates and draw comparisons with human-human experiments to demonstrate the effectiveness of the approach.
A Synthetic Electrocardiogram (ECG) Image Generation Toolbox to Facilitate Deep Learning-Based Scanned ECG Digitization
Jul 14, 2023The electrocardiogram (ECG) is an accurate and widely available tool for diagnosing cardiovascular diseases. ECGs have been recorded in printed formats for decades and their digitization holds great potential for training machine learning (ML) models in algorithmic ECG diagnosis. Physical ECG archives are at risk of deterioration and scanning printed ECGs alone is insufficient, as ML models require ECG time-series data. Therefore, the digitization and conversion of paper ECG archives into time-series data is of utmost importance. Deep learning models for image processing show promise in this regard. However, the scarcity of ECG archives with reference time-series is a challenge. Data augmentation techniques utilizing \textit{digital twins} present a potential solution. We introduce a novel method for generating synthetic ECG images on standard paper-like ECG backgrounds with realistic artifacts. Distortions including handwritten text artifacts, wrinkles, creases and perspective transforms are applied to the generated images, without personally identifiable information. As a use case, we generated an ECG image dataset of 21,801 records from the 12-lead PhysioNet PTB-XL ECG time-series dataset. A deep ECG image digitization model was built and trained on the synthetic dataset, and was employed to convert the synthetic images to time-series data for evaluation. The signal-to-noise ratio (SNR) was calculated to assess the image digitization quality vs the ground truth ECG time-series. The results show an average signal recovery SNR of 27$\pm$2.8\,dB, demonstrating the significance of the proposed synthetic ECG image dataset for training deep learning models. The codebase is available as an open-access toolbox for ECG research.
Robots Taking Initiative in Collaborative Object Manipulation: Lessons from Physical Human-Human Interaction
Apr 24, 2023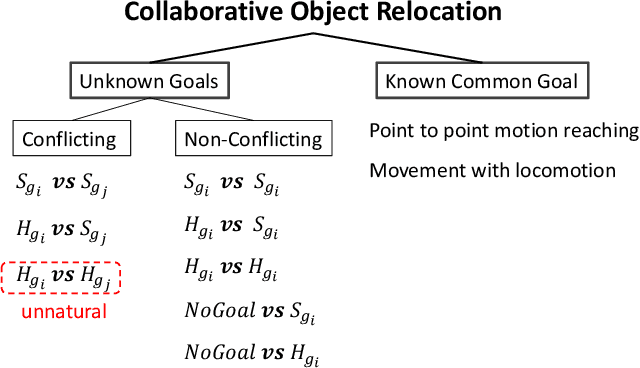
Physical Human-Human Interaction (pHHI) involves the use of multiple sensory modalities. Studies of communication through spoken utterances and gestures are well established. Nevertheless, communication through force signals is not well understood. In this paper, we focus on investigating the mechanisms employed by humans during the negotiation through force signals, which is an integral part of successful collaboration. Our objective is to use the insights to inform the design of controllers for robot assistants. Specifically, we want to enable robots to take the lead in collaboration. To achieve this goal, we conducted a study to observe how humans behave during collaborative manipulation tasks. During our preliminary data analysis, we discovered several new features that help us better understand how the interaction progresses. From these features, we identified distinct patterns in the data that indicate when a participant is expressing their intent. Our study provides valuable insight into how humans collaborate physically, which can help us design robots that behave more like humans in such scenarios.
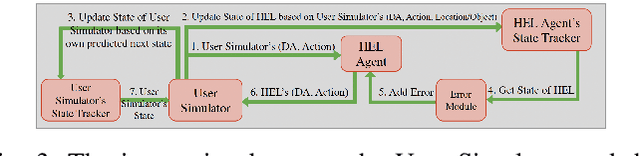
An End-to-End Human Simulator for Task-Oriented Multimodal Human-Robot Collaboration
Apr 02, 2023This paper proposes a neural network-based user simulator that can provide a multimodal interactive environment for training Reinforcement Learning (RL) agents in collaborative tasks involving multiple modes of communication. The simulator is trained on the existing ELDERLY-AT-HOME corpus and accommodates multiple modalities such as language, pointing gestures, and haptic-ostensive actions. The paper also presents a novel multimodal data augmentation approach, which addresses the challenge of using a limited dataset due to the expensive and time-consuming nature of collecting human demonstrations. Overall, the study highlights the potential for using RL and multimodal user simulators in developing and improving domestic assistive robots.
Multimodal Reinforcement Learning for Robots Collaborating with Humans
Mar 13, 2023


Robot assistants for older adults and people with disabilities need to interact with their users in collaborative tasks. The core component of these systems is an interaction manager whose job is to observe and assess the task, and infer the state of the human and their intent to choose the best course of action for the robot. Due to the sparseness of the data in this domain, the policy for such multi-modal systems is often crafted by hand; as the complexity of interactions grows this process is not scalable. In this paper, we propose a reinforcement learning (RL) approach to learn the robot policy. In contrast to the dialog systems, our agent is trained with a simulator developed by using human data and can deal with multiple modalities such as language and physical actions. We conducted a human study to evaluate the performance of the system in the interaction with a user. Our designed system shows promising preliminary results when it is used by a real user.
Evaluating Multimodal Interaction of Robots Assisting Older Adults
Dec 20, 2022



We outline our work on evaluating robots that assist older adults by engaging with them through multiple modalities that include physical interaction. Our thesis is that to increase the effectiveness of assistive robots: 1) robots need to understand and effect multimodal actions, 2) robots should not only react to the human, they need to take the initiative and lead the task when it is necessary. We start by briefly introducing our proposed framework for multimodal interaction and then describe two different experiments with the actual robots. In the first experiment, a Baxter robot helps a human find and locate an object using the Multimodal Interaction Manager (MIM) framework. In the second experiment, a NAO robot is used in the same task, however, the roles of the robot and the human are reversed. We discuss the evaluation methods that were used in these experiments, including different metrics employed to characterize the performance of the robot in each case. We conclude by providing our perspective on the challenges and opportunities for the evaluation of assistive robots for older adults in realistic settings.