 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeProactive Robot Control for Collaborative Manipulation Using Human Intent
Nov 06, 2023



Collaborative manipulation task often requires negotiation using explicit or implicit communication. An important example is determining where to move when the goal destination is not uniquely specified, and who should lead the motion. This work is motivated by the ability of humans to communicate the desired destination of motion through back-and-forth force exchanges. Inherent to these exchanges is also the ability to dynamically assign a role to each participant, either taking the initiative or deferring to the partner's lead. In this paper, we propose a hierarchical robot control framework that emulates human behavior in communicating a motion destination to a human collaborator and in responding to their actions. At the top level, the controller consists of a set of finite-state machines corresponding to different levels of commitment of the robot to its desired goal configuration. The control architecture is loosely based on the human strategy observed in the human-human experiments, and the key component is a real-time intent recognizer that helps the robot respond to human actions. We describe the details of the control framework, and feature engineering and training process of the intent recognition. The proposed controller was implemented on a UR10e robot (Universal Robots) and evaluated through human studies. The experiments show that the robot correctly recognizes and responds to human input, communicates its intent clearly, and resolves conflict. We report success rates and draw comparisons with human-human experiments to demonstrate the effectiveness of the approach.
Recognizing Intent in Collaborative Manipulation
Aug 17, 2023



Collaborative manipulation is inherently multimodal, with haptic communication playing a central role. When performed by humans, it involves back-and-forth force exchanges between the participants through which they resolve possible conflicts and determine their roles. Much of the existing work on collaborative human-robot manipulation assumes that the robot follows the human. But for a robot to match the performance of a human partner it needs to be able to take initiative and lead when appropriate. To achieve such human-like performance, the robot needs to have the ability to (1) determine the intent of the human, (2) clearly express its own intent, and (3) choose its actions so that the dyad reaches consensus. This work proposes a framework for recognizing human intent in collaborative manipulation tasks using force exchanges. Grounded in a dataset collected during a human study, we introduce a set of features that can be computed from the measured signals and report the results of a classifier trained on our collected human-human interaction data. Two metrics are used to evaluate the intent recognizer: overall accuracy and the ability to correctly identify transitions. The proposed recognizer shows robustness against the variations in the partner's actions and the confounding effects due to the variability in grasp forces and dynamic effects of walking. The results demonstrate that the proposed recognizer is well-suited for implementation in a physical interaction control scheme.
Robots Taking Initiative in Collaborative Object Manipulation: Lessons from Physical Human-Human Interaction
Apr 24, 2023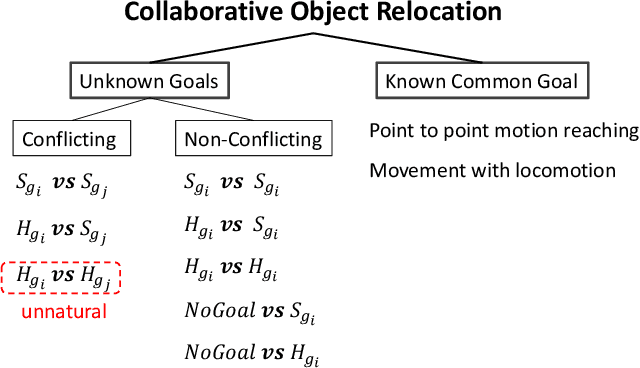
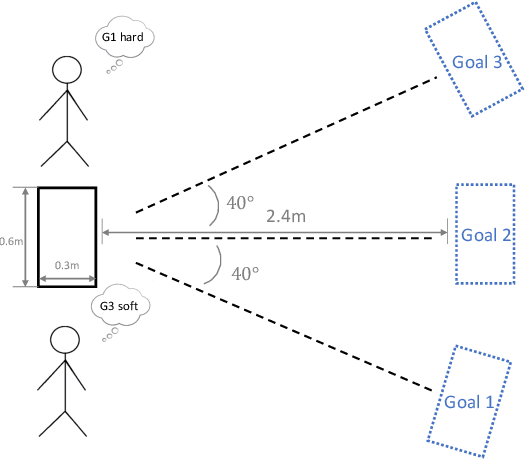
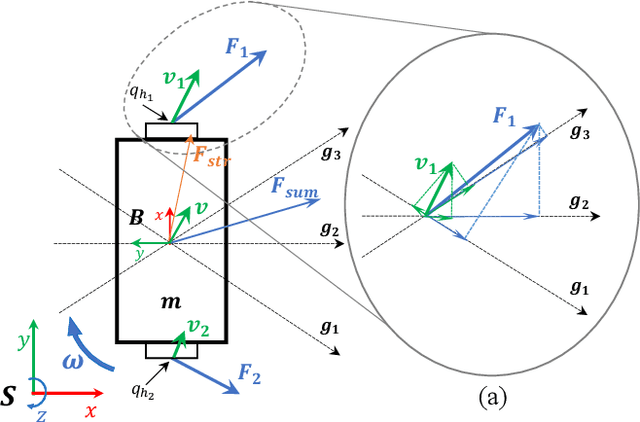
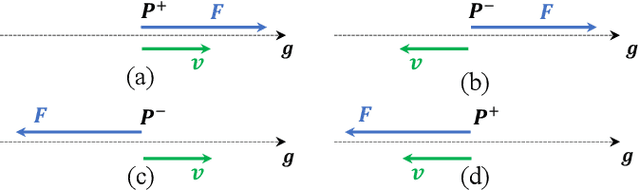
Physical Human-Human Interaction (pHHI) involves the use of multiple sensory modalities. Studies of communication through spoken utterances and gestures are well established. Nevertheless, communication through force signals is not well understood. In this paper, we focus on investigating the mechanisms employed by humans during the negotiation through force signals, which is an integral part of successful collaboration. Our objective is to use the insights to inform the design of controllers for robot assistants. Specifically, we want to enable robots to take the lead in collaboration. To achieve this goal, we conducted a study to observe how humans behave during collaborative manipulation tasks. During our preliminary data analysis, we discovered several new features that help us better understand how the interaction progresses. From these features, we identified distinct patterns in the data that indicate when a participant is expressing their intent. Our study provides valuable insight into how humans collaborate physically, which can help us design robots that behave more like humans in such scenarios.
Evaluating Multimodal Interaction of Robots Assisting Older Adults
Dec 20, 2022



We outline our work on evaluating robots that assist older adults by engaging with them through multiple modalities that include physical interaction. Our thesis is that to increase the effectiveness of assistive robots: 1) robots need to understand and effect multimodal actions, 2) robots should not only react to the human, they need to take the initiative and lead the task when it is necessary. We start by briefly introducing our proposed framework for multimodal interaction and then describe two different experiments with the actual robots. In the first experiment, a Baxter robot helps a human find and locate an object using the Multimodal Interaction Manager (MIM) framework. In the second experiment, a NAO robot is used in the same task, however, the roles of the robot and the human are reversed. We discuss the evaluation methods that were used in these experiments, including different metrics employed to characterize the performance of the robot in each case. We conclude by providing our perspective on the challenges and opportunities for the evaluation of assistive robots for older adults in realistic settings.