 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMask R-CNN
Papers and Code
Sparse Data Tree Canopy Segmentation: Fine-Tuning Leading Pretrained Models on Only 150 Images
Jan 16, 2026Tree canopy detection from aerial imagery is an important task for environmental monitoring, urban planning, and ecosystem analysis. Simulating real-life data annotation scarcity, the Solafune Tree Canopy Detection competition provides a small and imbalanced dataset of only 150 annotated images, posing significant challenges for training deep models without severe overfitting. In this work, we evaluate five representative architectures, YOLOv11, Mask R-CNN, DeepLabv3, Swin-UNet, and DINOv2, to assess their suitability for canopy segmentation under extreme data scarcity. Our experiments show that pretrained convolution-based models, particularly YOLOv11 and Mask R-CNN, generalize significantly better than pretrained transformer-based models. DeeplabV3, Swin-UNet and DINOv2 underperform likely due to differences between semantic and instance segmentation tasks, the high data requirements of Vision Transformers, and the lack of strong inductive biases. These findings confirm that transformer-based architectures struggle in low-data regimes without substantial pretraining or augmentation and that differences between semantic and instance segmentation further affect model performance. We provide a detailed analysis of training strategies, augmentation policies, and model behavior under the small-data constraint and demonstrate that lightweight CNN-based methods remain the most reliable for canopy detection on limited imagery.
A Physics-Constrained, Design-Driven Methodology for Defect Dataset Generation in Optical Lithography
Dec 09, 2025The efficacy of Artificial Intelligence (AI) in micro/nano manufacturing is fundamentally constrained by the scarcity of high-quality and physically grounded training data for defect inspection. Lithography defect data from semiconductor industry are rarely accessible for research use, resulting in a shortage of publicly available datasets. To address this bottleneck in lithography, this study proposes a novel methodology for generating large-scale, physically valid defect datasets with pixel-level annotations. The framework begins with the ab initio synthesis of defect layouts using controllable, physics-constrained mathematical morphology operations (erosion and dilation) applied to the original design-level layout. These synthesized layouts, together with their defect-free counterparts, are fabricated into physical samples via high-fidelity digital micromirror device (DMD)-based lithography. Optical micrographs of the synthesized defect samples and their defect-free references are then compared to create consistent defect delineation annotations. Using this methodology, we constructed a comprehensive dataset of 3,530 Optical micrographs containing 13,365 annotated defect instances including four classes: bridge, burr, pinch, and contamination. Each defect instance is annotated with a pixel-accurate segmentation mask, preserving full contour and geometry. The segmentation-based Mask R-CNN achieves AP@0.5 of 0.980, 0.965, and 0.971, compared with 0.740, 0.719, and 0.717 for Faster R-CNN on bridge, burr, and pinch classes, representing a mean AP@0.5 improvement of approximately 34%. For the contamination class, Mask R-CNN achieves an AP@0.5 roughly 42% higher than Faster R-CNN. These consistent gains demonstrate that our proposed methodology to generate defect datasets with pixel-level annotations is feasible for robust AI-based Measurement/Inspection (MI) in semiconductor fabrication.
A Scalable Pipeline Combining Procedural 3D Graphics and Guided Diffusion for Photorealistic Synthetic Training Data Generation in White Button Mushroom Segmentation
Dec 09, 2025Industrial mushroom cultivation increasingly relies on computer vision for monitoring and automated harvesting. However, developing accurate detection and segmentation models requires large, precisely annotated datasets that are costly to produce. Synthetic data provides a scalable alternative, yet often lacks sufficient realism to generalize to real-world scenarios. This paper presents a novel workflow that integrates 3D rendering in Blender with a constrained diffusion model to automatically generate high-quality annotated, photorealistic synthetic images of Agaricus Bisporus mushrooms. This approach preserves full control over 3D scene configuration and annotations while achieving photorealism without the need for specialized computer graphics expertise. We release two synthetic datasets (each containing 6,000 images depicting over 250k mushroom instances) and evaluate Mask R-CNN models trained on them in a zero-shot setting. When tested on two independent real-world datasets (including a newly collected benchmark), our method achieves state-of-the-art segmentation performance (F1 = 0.859 on M18K), despite using only synthetic training data. Although the approach is demonstrated on Agaricus Bisporus mushrooms, the proposed pipeline can be readily adapted to other mushroom species or to other agricultural domains, such as fruit and leaf detection.
Deep Learning for Accurate Vision-based Catch Composition in Tropical Tuna Purse Seiners
Nov 19, 2025

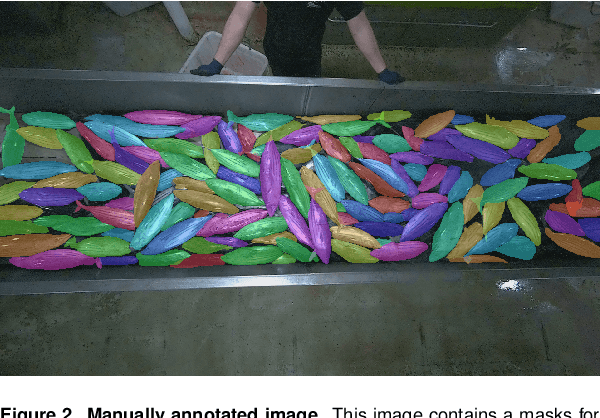

Purse seiners play a crucial role in tuna fishing, as approximately 69% of the world's tropical tuna is caught using this gear. All tuna Regional Fisheries Management Organizations have established minimum standards to use electronic monitoring (EM) in fisheries in addition to traditional observers. The EM systems produce a massive amount of video data that human analysts must process. Integrating artificial intelligence (AI) into their workflow can decrease that workload and improve the accuracy of the reports. However, species identification still poses significant challenges for AI, as achieving balanced performance across all species requires appropriate training data. Here, we quantify the difficulty experts face to distinguish bigeye tuna (BET, Thunnus Obesus) from yellowfin tuna (YFT, Thunnus Albacares) using images captured by EM systems. We found inter-expert agreements of 42.9% $\pm$ 35.6% for BET and 57.1% $\pm$ 35.6% for YFT. We then present a multi-stage pipeline to estimate the species composition of the catches using a reliable ground-truth dataset based on identifications made by observers on board. Three segmentation approaches are compared: Mask R-CNN, a combination of DINOv2 with SAM2, and a integration of YOLOv9 with SAM2. We found that the latest performs the best, with a validation mean average precision of 0.66 $\pm$ 0.03 and a recall of 0.88 $\pm$ 0.03. Segmented individuals are tracked using ByteTrack. For classification, we evaluate a standard multiclass classification model and a hierarchical approach, finding a superior generalization by the hierarchical. All our models were cross-validated during training and tested on fishing operations with fully known catch composition. Combining YOLOv9-SAM2 with the hierarchical classification produced the best estimations, with 84.8% of the individuals being segmented and classified with a mean average error of 4.5%.
Computer Vision based group activity detection and action spotting
Nov 17, 2025



Group activity detection in multi-person scenes is challenging due to complex human interactions, occlusions, and variations in appearance over time. This work presents a computer vision based framework for group activity recognition and action spotting using a combination of deep learning models and graph based relational reasoning. The system first applies Mask R-CNN to obtain accurate actor localization through bounding boxes and instance masks. Multiple backbone networks, including Inception V3, MobileNet, and VGG16, are used to extract feature maps, and RoIAlign is applied to preserve spatial alignment when generating actor specific features. The mask information is then fused with the feature maps to obtain refined masked feature representations for each actor. To model interactions between individuals, we construct Actor Relation Graphs that encode appearance similarity and positional relations using methods such as normalized cross correlation, sum of absolute differences, and dot product. Graph Convolutional Networks operate on these graphs to reason about relationships and predict both individual actions and group level activities. Experiments on the Collective Activity dataset demonstrate that the combination of mask based feature refinement, robust similarity search, and graph neural network reasoning leads to improved recognition performance across both crowded and non crowded scenarios. This approach highlights the potential of integrating segmentation, feature extraction, and relational graph reasoning for complex video understanding tasks.
Extreme Model Compression with Structured Sparsity at Low Precision
Nov 11, 2025Deep neural networks (DNNs) are used in many applications, but their large size and high computational cost make them hard to run on devices with limited resources. Two widely used techniques to address this challenge are weight quantization, which lowers the precision of all weights, and structured sparsity, which removes unimportant weights while retaining the important ones at full precision. Although both are effective individually, they are typically studied in isolation due to their compounded negative impact on model accuracy when combined. In this work, we introduce SLOPE Structured Sparsity at Low Precision), a unified framework, to effectively combine structured sparsity and low-bit quantization in a principled way. We show that naively combining sparsity and quantization severely harms performance due to the compounded impact of both techniques. To address this, we propose a training-time regularization strategy that minimizes the discrepancy between full-precision weights and their sparse, quantized counterparts by promoting angular alignment rather than direct matching. On ResNet-18, SLOPE achieves $\sim20\times$ model size reduction while retaining $\sim$99% of the original accuracy. It consistently outperforms state-of-the-art quantization and structured sparsity methods across classification, detection, and segmentation tasks on models such as ResNet-18, ViT-Small, and Mask R-CNN.
A Critical Study on Tea Leaf Disease Detection using Deep Learning Techniques
Oct 26, 2025The proposed solution is Deep Learning Technique that will be able classify three types of tea leaves diseases from which two diseases are caused by the pests and one due to pathogens (infectious organisms) and environmental conditions and also show the area damaged by a disease in leaves. Namely Red Rust, Helopeltis and Red spider mite respectively. In this paper we have evaluated two models namely SSD MobileNet V2 and Faster R-CNN ResNet50 V1 for the object detection. The SSD MobileNet V2 gave precision of 0.209 for IOU range of 0.50:0.95 with recall of 0.02 on IOU 0.50:0.95 and final mAP of 20.9%. While Faster R-CNN ResNet50 V1 has precision of 0.252 on IOU range of 0.50:0.95 and recall of 0.044 on IOU of 0.50:0.95 with a mAP of 25%, which is better than SSD. Also used Mask R-CNN for Object Instance Segmentation where we have implemented our custom method to calculate the damaged diseased portion of leaves. Keywords: Tea Leaf Disease, Deep Learning, Red Rust, Helopeltis and Red Spider Mite, SSD MobileNet V2, Faster R-CNN ResNet50 V1 and Mask RCNN.
Synthetic Data-Driven Multi-Architecture Framework for Automated Polyp Segmentation Through Integrated Detection and Mask Generation
Aug 08, 2025Colonoscopy is a vital tool for the early diagnosis of colorectal cancer, which is one of the main causes of cancer-related mortality globally; hence, it is deemed an essential technique for the prevention and early detection of colorectal cancer. The research introduces a unique multidirectional architectural framework to automate polyp detection within colonoscopy images while helping resolve limited healthcare dataset sizes and annotation complexities. The research implements a comprehensive system that delivers synthetic data generation through Stable Diffusion enhancements together with detection and segmentation algorithms. This detection approach combines Faster R-CNN for initial object localization while the Segment Anything Model (SAM) refines the segmentation masks. The faster R-CNN detection algorithm achieved a recall of 93.08% combined with a precision of 88.97% and an F1 score of 90.98%.SAM is then used to generate the image mask. The research evaluated five state-of-the-art segmentation models that included U-Net, PSPNet, FPN, LinkNet, and MANet using ResNet34 as a base model. The results demonstrate the superior performance of FPN with the highest scores of PSNR (7.205893) and SSIM (0.492381), while UNet excels in recall (84.85%) and LinkNet shows balanced performance in IoU (64.20%) and Dice score (77.53%).
A2Mamba: Attention-augmented State Space Models for Visual Recognition
Jul 22, 2025Transformers and Mamba, initially invented for natural language processing, have inspired backbone architectures for visual recognition. Recent studies integrated Local Attention Transformers with Mamba to capture both local details and global contexts. Despite competitive performance, these methods are limited to simple stacking of Transformer and Mamba layers without any interaction mechanism between them. Thus, deep integration between Transformer and Mamba layers remains an open problem. We address this problem by proposing A2Mamba, a powerful Transformer-Mamba hybrid network architecture, featuring a new token mixer termed Multi-scale Attention-augmented State Space Model (MASS), where multi-scale attention maps are integrated into an attention-augmented SSM (A2SSM). A key step of A2SSM performs a variant of cross-attention by spatially aggregating the SSM's hidden states using the multi-scale attention maps, which enhances spatial dependencies pertaining to a two-dimensional space while improving the dynamic modeling capabilities of SSMs. Our A2Mamba outperforms all previous ConvNet-, Transformer-, and Mamba-based architectures in visual recognition tasks. For instance, A2Mamba-L achieves an impressive 86.1% top-1 accuracy on ImageNet-1K. In semantic segmentation, A2Mamba-B exceeds CAFormer-S36 by 2.5% in mIoU, while exhibiting higher efficiency. In object detection and instance segmentation with Cascade Mask R-CNN, A2Mamba-S surpasses MambaVision-B by 1.2%/0.9% in AP^b/AP^m, while having 40% less parameters. Code is publicly available at https://github.com/LMMMEng/A2Mamba.
A novel visual data-based diagnostic approach for estimation of regime transition in pool boiling
Jun 12, 2025This study introduces a novel metric, the Index of Visual Similarity (IVS), to qualitatively characterize boiling heat transfer regimes using only visual data. The IVS is constructed by combining morphological similarity, through SIFT-based feature matching, with physical similarity, via vapor area estimation using Mask R-CNN. High-speed images of pool boiling on two distinct surfaces, polished copper and porous copper foam, are employed to demonstrate the generalizability of the approach. IVS captures critical changes in bubble shape, size, and distribution that correspond to transitions in heat transfer mechanisms. The metric is validated against an equivalent metric, $\Phi$, derived from measured heat transfer coefficients (HTC), showing strong correlation and reliability in detecting boiling regime transitions, including the onset of nucleate boiling and proximity to critical heat flux (CHF). Given experimental limitations in precisely measuring changes in HTC, the sensitivity of IVS to surface superheat is also examined to reinforce the credibility of IVS. IVS thus emerges as a powerful, rapid, and non-intrusive tool for real-time, image-based boiling diagnostics, with promising applications in phase change heat transfer.