 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDronecrowd
Papers and Code
Improving trajectory continuity in drone-based crowd monitoring using a set of minimal-cost techniques and deep discriminative correlation filters
Apr 28, 2025Drone-based crowd monitoring is the key technology for applications in surveillance, public safety, and event management. However, maintaining tracking continuity and consistency remains a significant challenge. Traditional detection-assignment tracking methods struggle with false positives, false negatives, and frequent identity switches, leading to degraded counting accuracy and making in-depth analysis impossible. This paper introduces a point-oriented online tracking algorithm that improves trajectory continuity and counting reliability in drone-based crowd monitoring. Our method builds on the Simple Online and Real-time Tracking (SORT) framework, replacing the original bounding-box assignment with a point-distance metric. The algorithm is enhanced with three cost-effective techniques: camera motion compensation, altitude-aware assignment, and classification-based trajectory validation. Further, Deep Discriminative Correlation Filters (DDCF) that re-use spatial feature maps from localisation algorithms for increased computational efficiency through neural network resource sharing are integrated to refine object tracking by reducing noise and handling missed detections. The proposed method is evaluated on the DroneCrowd and newly shared UP-COUNT-TRACK datasets, demonstrating substantial improvements in tracking metrics, reducing counting errors to 23% and 15%, respectively. The results also indicate a significant reduction of identity switches while maintaining high tracking accuracy, outperforming baseline online trackers and even an offline greedy optimisation method.
Enhancing people localisation in drone imagery for better crowd management by utilising every pixel in high-resolution images
Feb 06, 2025Accurate people localisation using drones is crucial for effective crowd management, not only during massive events and public gatherings but also for monitoring daily urban crowd flow. Traditional methods for tiny object localisation using high-resolution drone imagery often face limitations in precision and efficiency, primarily due to constraints in image scaling and sliding window techniques. To address these challenges, a novel approach dedicated to point-oriented object localisation is proposed. Along with this approach, the Pixel Distill module is introduced to enhance the processing of high-definition images by extracting spatial information from individual pixels at once. Additionally, a new dataset named UP-COUNT, tailored to contemporary drone applications, is shared. It addresses a wide range of challenges in drone imagery, such as simultaneous camera and object movement during the image acquisition process, pushing forward the capabilities of crowd management applications. A comprehensive evaluation of the proposed method on the proposed dataset and the commonly used DroneCrowd dataset demonstrates the superiority of our approach over existing methods and highlights its efficacy in drone-based crowd object localisation tasks. These improvements markedly increase the algorithm's applicability to operate in real-world scenarios, enabling more reliable localisation and counting of individuals in dynamic environments.
DenseTrack: Drone-based Crowd Tracking via Density-aware Motion-appearance Synergy
Jul 26, 2024



Drone-based crowd tracking faces difficulties in accurately identifying and monitoring objects from an aerial perspective, largely due to their small size and close proximity to each other, which complicates both localization and tracking. To address these challenges, we present the Density-aware Tracking (DenseTrack) framework. DenseTrack capitalizes on crowd counting to precisely determine object locations, blending visual and motion cues to improve the tracking of small-scale objects. It specifically addresses the problem of cross-frame motion to enhance tracking accuracy and dependability. DenseTrack employs crowd density estimates as anchors for exact object localization within video frames. These estimates are merged with motion and position information from the tracking network, with motion offsets serving as key tracking cues. Moreover, DenseTrack enhances the ability to distinguish small-scale objects using insights from the visual-language model, integrating appearance with motion cues. The framework utilizes the Hungarian algorithm to ensure the accurate matching of individuals across frames. Demonstrated on DroneCrowd dataset, our approach exhibits superior performance, confirming its effectiveness in scenarios captured by drones.
Detection, Tracking, and Counting Meets Drones in Crowds: A Benchmark
May 06, 2021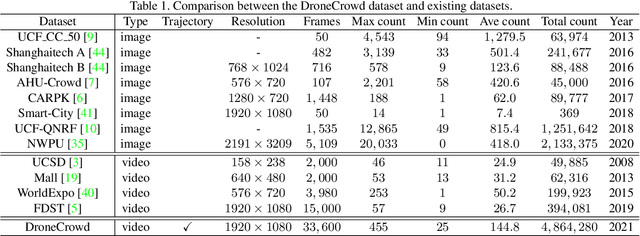
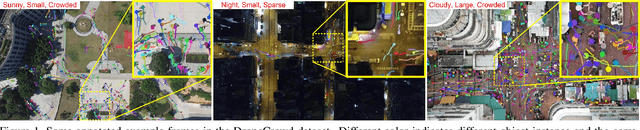


To promote the developments of object detection, tracking and counting algorithms in drone-captured videos, we construct a benchmark with a new drone-captured largescale dataset, named as DroneCrowd, formed by 112 video clips with 33,600 HD frames in various scenarios. Notably, we annotate 20,800 people trajectories with 4.8 million heads and several video-level attributes. Meanwhile, we design the Space-Time Neighbor-Aware Network (STNNet) as a strong baseline to solve object detection, tracking and counting jointly in dense crowds. STNNet is formed by the feature extraction module, followed by the density map estimation heads, and localization and association subnets. To exploit the context information of neighboring objects, we design the neighboring context loss to guide the association subnet training, which enforces consistent relative position of nearby objects in temporal domain. Extensive experiments on our DroneCrowd dataset demonstrate that STNNet performs favorably against the state-of-the-arts.
Drone-based Joint Density Map Estimation, Localization and Tracking with Space-Time Multi-Scale Attention Network
Dec 04, 2019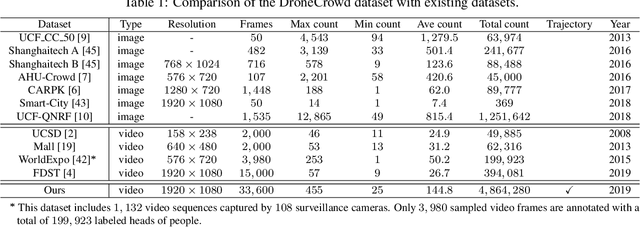

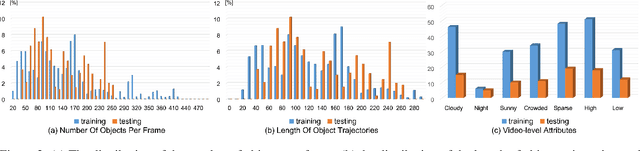

This paper proposes a space-time multi-scale attention network (STANet) to solve density map estimation, localization and tracking in dense crowds of video clips captured by drones with arbitrary crowd density, perspective, and flight altitude. Our STANet method aggregates multi-scale feature maps in sequential frames to exploit the temporal coherency, and then predict the density maps, localize the targets, and associate them in crowds simultaneously. A coarse-to-fine process is designed to gradually apply the attention module on the aggregated multi-scale feature maps to enforce the network to exploit the discriminative space-time features for better performance. The whole network is trained in an end-to-end manner with the multi-task loss, formed by three terms, i.e., the density map loss, localization loss and association loss. The non-maximal suppression followed by the min-cost flow framework is used to generate the trajectories of targets' in scenarios. Since existing crowd counting datasets merely focus on crowd counting in static cameras rather than density map estimation, counting and tracking in crowds on drones, we have collected a new large-scale drone-based dataset, DroneCrowd, formed by 112 video clips with 33,600 high resolution frames (i.e., 1920x1080) captured in 70 different scenarios. With intensive amount of effort, our dataset provides 20,800 people trajectories with 4.8 million head annotations and several video-level attributes in sequences. Extensive experiments are conducted on two challenging public datasets, i.e., Shanghaitech and UCF-QNRF, and our DroneCrowd, to demonstrate that STANet achieves favorable performance against the state-of-the-arts. The datasets and codes can be found at https://github.com/VisDrone.