 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeep Imitation Learning of Sequential Fabric Smoothing Policies
Paper and Code
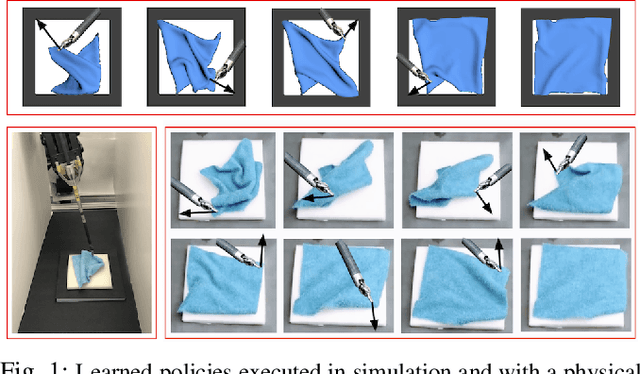

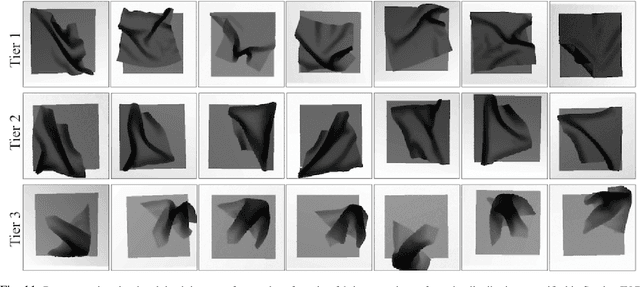
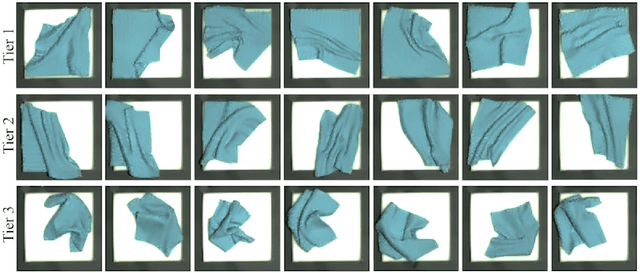
Sequential pulling policies to flatten and smooth fabrics have applications from surgery to manufacturing to home tasks such as bed making and folding clothes. Due to the complexity of fabric states and dynamics, we apply deep imitation learning to learn policies that, given color or depth images of a rectangular fabric sample, estimate pick points and pull vectors to spread the fabric to maximize coverage. To generate data, we develop a fabric simulator and an algorithmic demonstrator that has access to complete state information. We train policies in simulation using domain randomization and dataset aggregation (DAgger) on three tiers of difficulty in the initial randomized configuration. We present results comparing five baseline policies to learned policies and report systematic comparisons of color vs. depth images as inputs. In simulation, learned policies achieve comparable or superior performance to analytic baselines. In 120 physical experiments with the da Vinci Research Kit (dVRK) surgical robot, policies trained in simulation attain 86% and 69% final coverage for color and depth inputs, respectively, suggesting the feasibility of learning fabric smoothing policies from simulation. Supplementary material is available at https://sites.google.com/view/ fabric-smoothing.