 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReflective Gaussian Splatting
Dec 26, 2024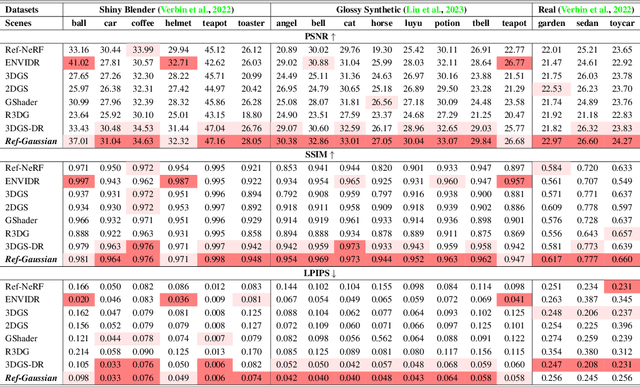
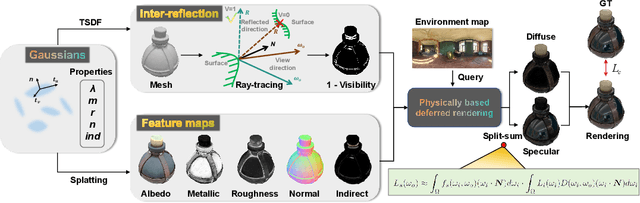
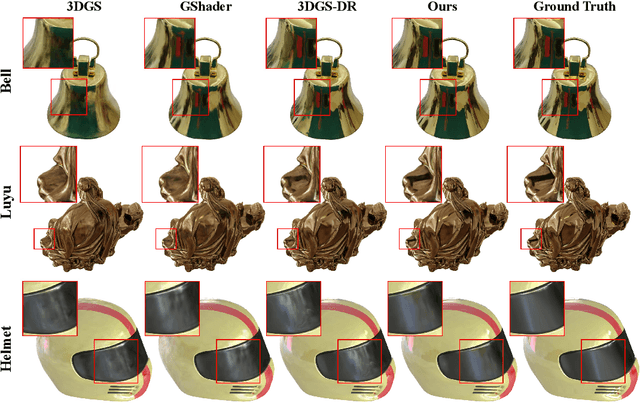

Novel view synthesis has experienced significant advancements owing to increasingly capable NeRF- and 3DGS-based methods. However, reflective object reconstruction remains challenging, lacking a proper solution to achieve real-time, high-quality rendering while accommodating inter-reflection. To fill this gap, we introduce a Reflective Gaussian splatting (\textbf{Ref-Gaussian}) framework characterized with two components: (I) {\em Physically based deferred rendering} that empowers the rendering equation with pixel-level material properties via formulating split-sum approximation; (II) {\em Gaussian-grounded inter-reflection} that realizes the desired inter-reflection function within a Gaussian splatting paradigm for the first time. To enhance geometry modeling, we further introduce material-aware normal propagation and an initial per-Gaussian shading stage, along with 2D Gaussian primitives. Extensive experiments on standard datasets demonstrate that Ref-Gaussian surpasses existing approaches in terms of quantitative metrics, visual quality, and compute efficiency. Further, we show that our method serves as a unified solution for both reflective and non-reflective scenes, going beyond the previous alternatives focusing on only reflective scenes. Also, we illustrate that Ref-Gaussian supports more applications such as relighting and editing.
IRGS: Inter-Reflective Gaussian Splatting with 2D Gaussian Ray Tracing
Dec 20, 2024In inverse rendering, accurately modeling visibility and indirect radiance for incident light is essential for capturing secondary effects. Due to the absence of a powerful Gaussian ray tracer, previous 3DGS-based methods have either adopted a simplified rendering equation or used learnable parameters to approximate incident light, resulting in inaccurate material and lighting estimations. To this end, we introduce inter-reflective Gaussian splatting (IRGS) for inverse rendering. To capture inter-reflection, we apply the full rendering equation without simplification and compute incident radiance on the fly using the proposed differentiable 2D Gaussian ray tracing. Additionally, we present an efficient optimization scheme to handle the computational demands of Monte Carlo sampling for rendering equation evaluation. Furthermore, we introduce a novel strategy for querying the indirect radiance of incident light when relighting the optimized scenes. Extensive experiments on multiple standard benchmarks validate the effectiveness of IRGS, demonstrating its capability to accurately model complex inter-reflection effects.
Evaluating Modern Approaches in 3D Scene Reconstruction: NeRF vs Gaussian-Based Methods
Aug 08, 2024Exploring the capabilities of Neural Radiance Fields (NeRF) and Gaussian-based methods in the context of 3D scene reconstruction, this study contrasts these modern approaches with traditional Simultaneous Localization and Mapping (SLAM) systems. Utilizing datasets such as Replica and ScanNet, we assess performance based on tracking accuracy, mapping fidelity, and view synthesis. Findings reveal that NeRF excels in view synthesis, offering unique capabilities in generating new perspectives from existing data, albeit at slower processing speeds. Conversely, Gaussian-based methods provide rapid processing and significant expressiveness but lack comprehensive scene completion. Enhanced by global optimization and loop closure techniques, newer methods like NICE-SLAM and SplaTAM not only surpass older frameworks such as ORB-SLAM2 in terms of robustness but also demonstrate superior performance in dynamic and complex environments. This comparative analysis bridges theoretical research with practical implications, shedding light on future developments in robust 3D scene reconstruction across various real-world applications.