 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBundle Adjustment in the Eager Mode
Sep 18, 2024



Bundle adjustment (BA) is a critical technique in various robotic applications, such as simultaneous localization and mapping (SLAM), augmented reality (AR), and photogrammetry. BA optimizes parameters such as camera poses and 3D landmarks to align them with observations. With the growing importance of deep learning in perception systems, there is an increasing need to integrate BA with deep learning frameworks for enhanced reliability and performance. However, widely-used C++-based BA frameworks, such as GTSAM, g$^2$o, and Ceres, lack native integration with modern deep learning libraries like PyTorch. This limitation affects their flexibility, adaptability, ease of debugging, and overall implementation efficiency. To address this gap, we introduce an eager-mode BA framework seamlessly integrated with PyPose, providing PyTorch-compatible interfaces with high efficiency. Our approach includes GPU-accelerated, differentiable, and sparse operations designed for 2nd-order optimization, Lie group and Lie algebra operations, and linear solvers. Our eager-mode BA on GPU demonstrates substantial runtime efficiency, achieving an average speedup of 18.5$\times$, 22$\times$, and 23$\times$ compared to GTSAM, g$^2$o, and Ceres, respectively.
PyPose v0.6: The Imperative Programming Interface for Robotics
Sep 22, 2023
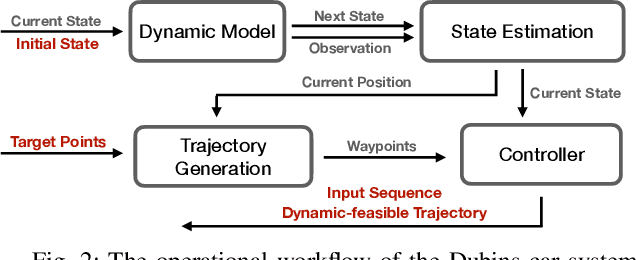
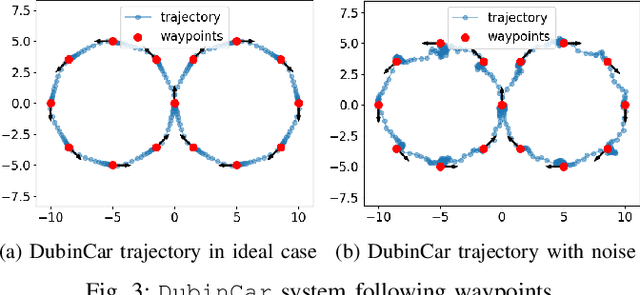
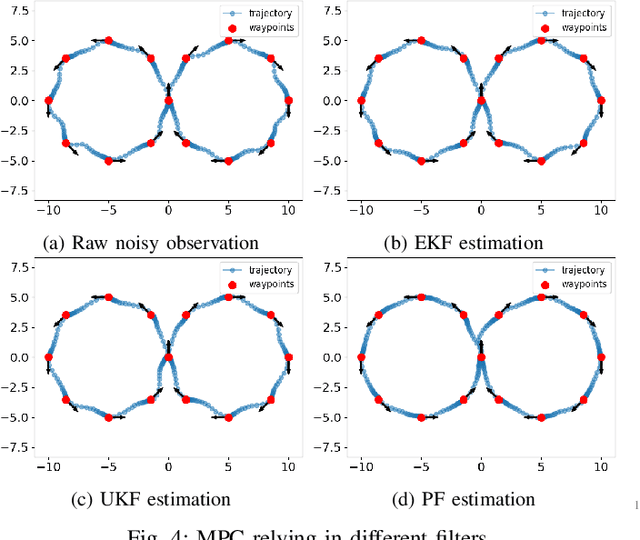
PyPose is an open-source library for robot learning. It combines a learning-based approach with physics-based optimization, which enables seamless end-to-end robot learning. It has been used in many tasks due to its meticulously designed application programming interface (API) and efficient implementation. From its initial launch in early 2022, PyPose has experienced significant enhancements, incorporating a wide variety of new features into its platform. To satisfy the growing demand for understanding and utilizing the library and reduce the learning curve of new users, we present the fundamental design principle of the imperative programming interface, and showcase the flexible usage of diverse functionalities and modules using an extremely simple Dubins car example. We also demonstrate that the PyPose can be easily used to navigate a real quadruped robot with a few lines of code.