 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFrom Parameter to Representation: A Closed-Form Approach for Controllable Model Merging
Nov 14, 2025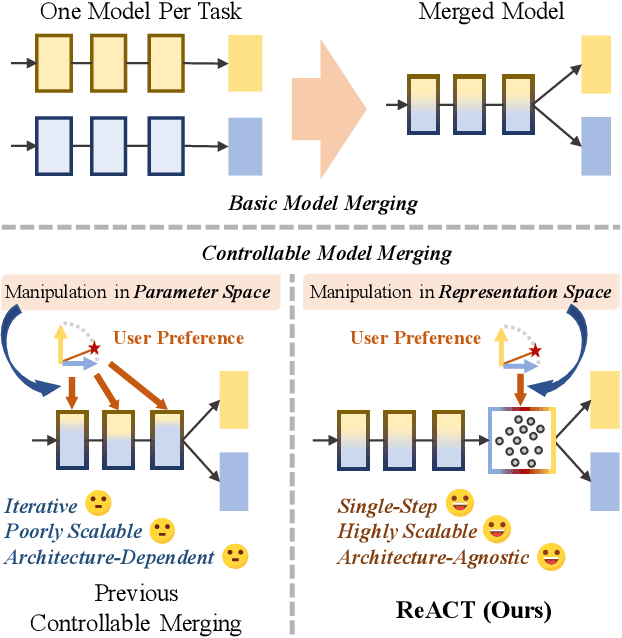
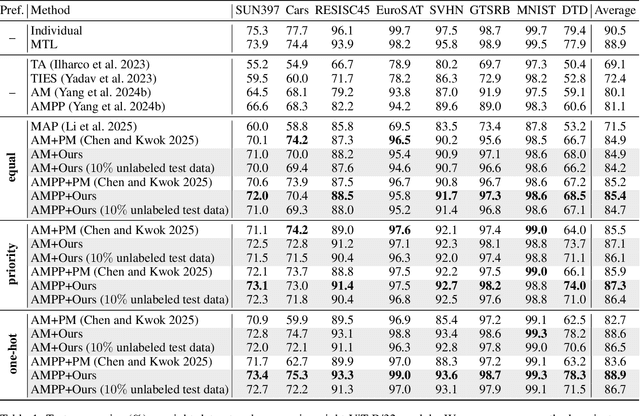
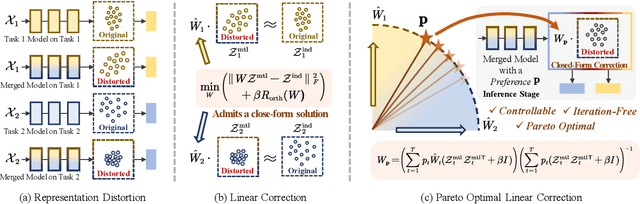
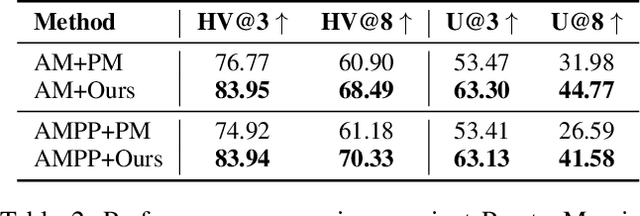
Model merging combines expert models for multitask performance but faces challenges from parameter interference. This has sparked recent interest in controllable model merging, giving users the ability to explicitly balance performance trade-offs. Existing approaches employ a compile-then-query paradigm, performing a costly offline multi-objective optimization to enable fast, preference-aware model generation. This offline stage typically involves iterative search or dedicated training, with complexity that grows exponentially with the number of tasks. To overcome these limitations, we shift the perspective from parameter-space optimization to a direct correction of the model's final representation. Our approach models this correction as an optimal linear transformation, yielding a closed-form solution that replaces the entire offline optimization process with a single-step, architecture-agnostic computation. This solution directly incorporates user preferences, allowing a Pareto-optimal model to be generated on-the-fly with complexity that scales linearly with the number of tasks. Experimental results show our method generates a superior Pareto front with more precise preference alignment and drastically reduced computational cost.
Microservice Deployment in Space Computing Power Networks via Robust Reinforcement Learning
Jan 08, 2025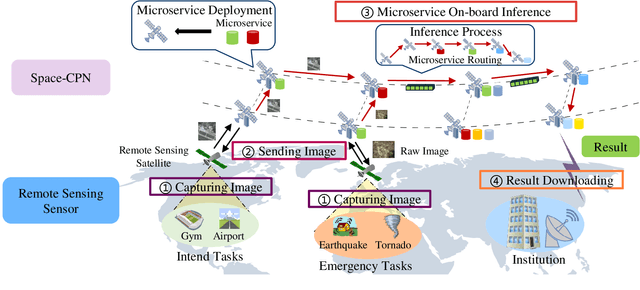
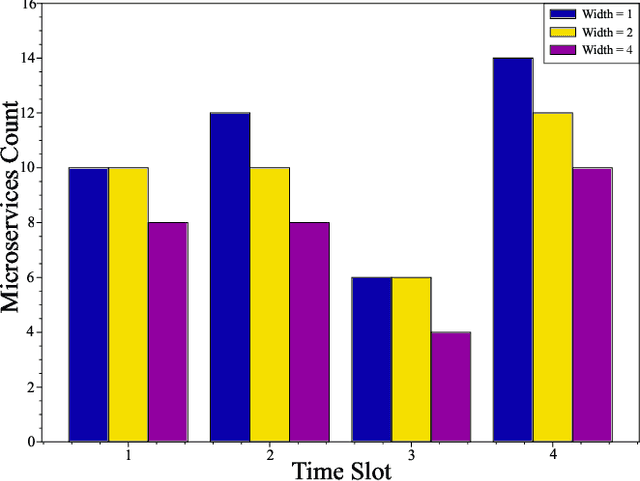
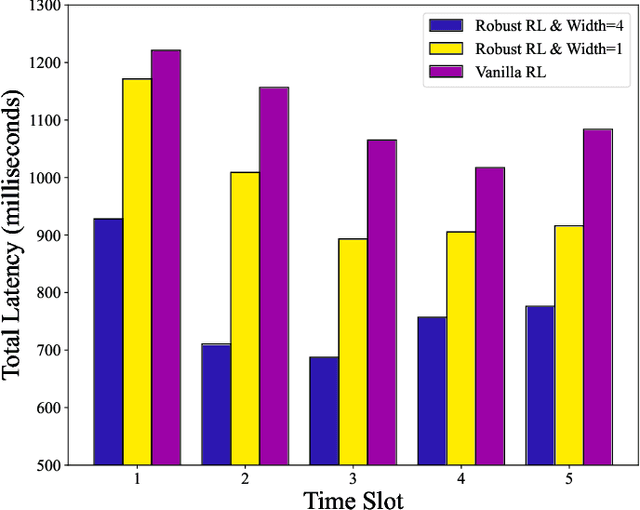
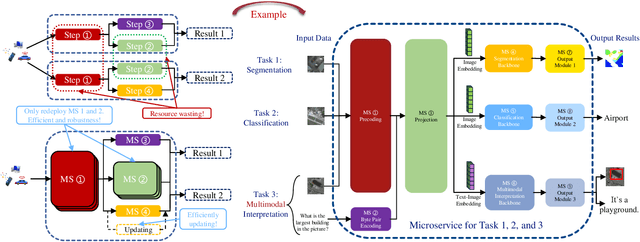
With the growing demand for Earth observation, it is important to provide reliable real-time remote sensing inference services to meet the low-latency requirements. The Space Computing Power Network (Space-CPN) offers a promising solution by providing onboard computing and extensive coverage capabilities for real-time inference. This paper presents a remote sensing artificial intelligence applications deployment framework designed for Low Earth Orbit satellite constellations to achieve real-time inference performance. The framework employs the microservice architecture, decomposing monolithic inference tasks into reusable, independent modules to address high latency and resource heterogeneity. This distributed approach enables optimized microservice deployment, minimizing resource utilization while meeting quality of service and functional requirements. We introduce Robust Optimization to the deployment problem to address data uncertainty. Additionally, we model the Robust Optimization problem as a Partially Observable Markov Decision Process and propose a robust reinforcement learning algorithm to handle the semi-infinite Quality of Service constraints. Our approach yields sub-optimal solutions that minimize accuracy loss while maintaining acceptable computational costs. Simulation results demonstrate the effectiveness of our framework.
Collaborative Route Planning of UAVs, Workers and Cars for Crowdsensing in Disaster Response
Aug 21, 2023
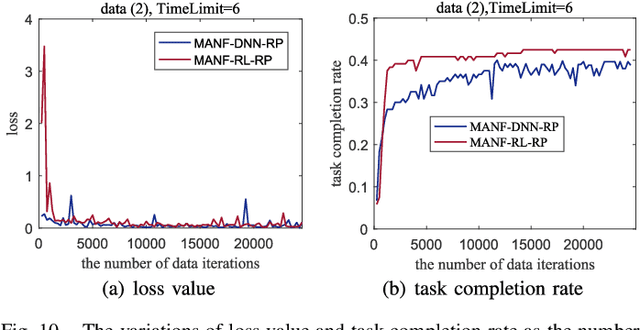
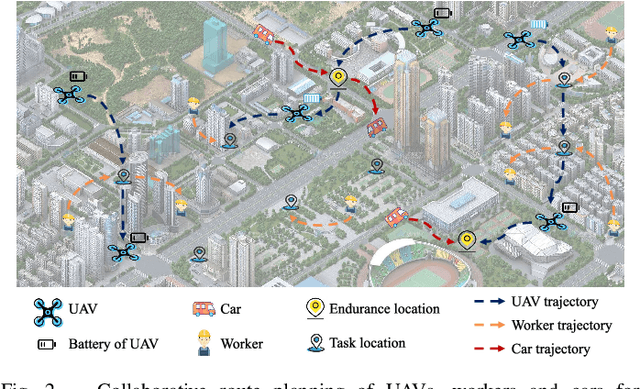
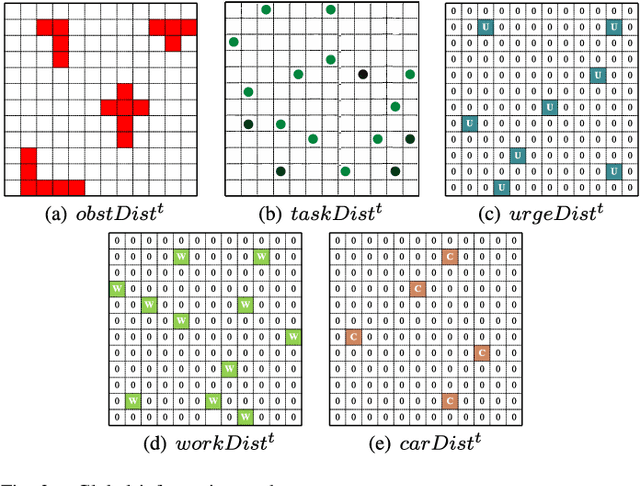
Efficiently obtaining the up-to-date information in the disaster-stricken area is the key to successful disaster response. Unmanned aerial vehicles (UAVs), workers and cars can collaborate to accomplish sensing tasks, such as data collection, in disaster-stricken areas. In this paper, we explicitly address the route planning for a group of agents, including UAVs, workers, and cars, with the goal of maximizing the task completion rate. We propose MANF-RL-RP, a heterogeneous multi-agent route planning algorithm that incorporates several efficient designs, including global-local dual information processing and a tailored model structure for heterogeneous multi-agent systems. Global-local dual information processing encompasses the extraction and dissemination of spatial features from global information, as well as the partitioning and filtering of local information from individual agents. Regarding the construction of the model structure for heterogeneous multi-agent, we perform the following work. We design the same data structure to represent the states of different agents, prove the Markovian property of the decision-making process of agents to simplify the model structure, and also design a reasonable reward function to train the model. Finally, we conducted detailed experiments based on the rich simulation data. In comparison to the baseline algorithms, namely Greedy-SC-RP and MANF-DNN-RP, MANF-RL-RP has exhibited a significant improvement in terms of task completion rate.
Object Tracking by Least Spatiotemporal Searches
Jul 18, 2020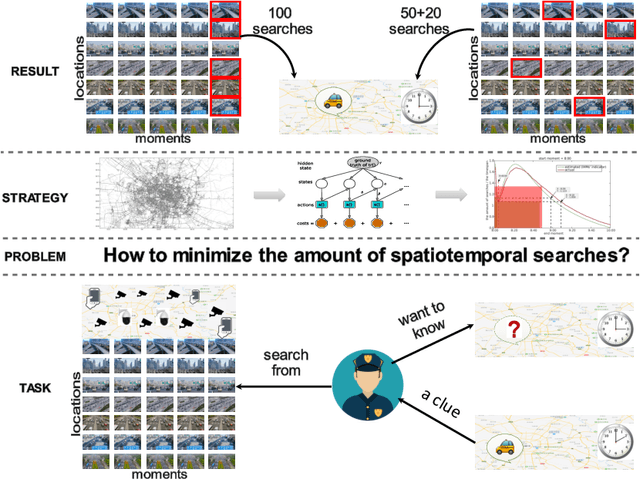
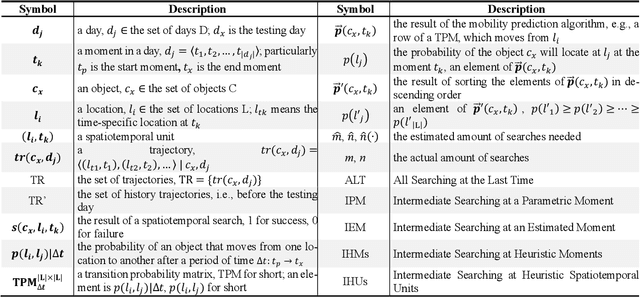
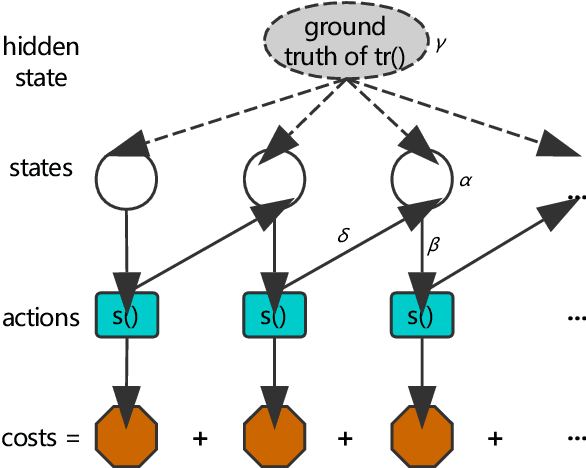
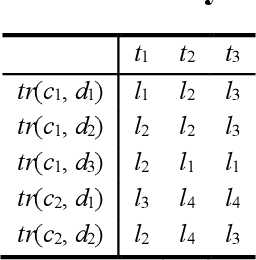
Tracking a car or a person in a city is crucial for urban safety management. How can we complete the task with minimal number of spatiotemporal searches from massive camera records? This paper proposes a strategy named IHMs (Intermediate Searching at Heuristic Moments): each step we figure out which moment is the best to search according to a heuristic indicator, then at that moment search locations one by one in descending order of predicted appearing probabilities, until a search hits; iterate this step until we get the object's current location. Five searching strategies are compared in experiments, and IHMs is validated to be most efficient, which can save up to 1/3 total costs. This result provides an evidence that "searching at intermediate moments can save cost".