 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeX-SLAM: Scalable Dense SLAM for Task-aware Optimization using CSFD
May 03, 2024We present X-SLAM, a real-time dense differentiable SLAM system that leverages the complex-step finite difference (CSFD) method for efficient calculation of numerical derivatives, bypassing the need for a large-scale computational graph. The key to our approach is treating the SLAM process as a differentiable function, enabling the calculation of the derivatives of important SLAM parameters through Taylor series expansion within the complex domain. Our system allows for the real-time calculation of not just the gradient, but also higher-order differentiation. This facilitates the use of high-order optimizers to achieve better accuracy and faster convergence. Building on X-SLAM, we implemented end-to-end optimization frameworks for two important tasks: camera relocalization in wide outdoor scenes and active robotic scanning in complex indoor environments. Comprehensive evaluations on public benchmarks and intricate real scenes underscore the improvements in the accuracy of camera relocalization and the efficiency of robotic navigation achieved through our task-aware optimization. The code and data are available at https://gapszju.github.io/X-SLAM.
RTG-SLAM: Real-time 3D Reconstruction at Scale using Gaussian Splatting
May 01, 2024



We present Real-time Gaussian SLAM (RTG-SLAM), a real-time 3D reconstruction system with an RGBD camera for large-scale environments using Gaussian splatting. The system features a compact Gaussian representation and a highly efficient on-the-fly Gaussian optimization scheme. We force each Gaussian to be either opaque or nearly transparent, with the opaque ones fitting the surface and dominant colors, and transparent ones fitting residual colors. By rendering depth in a different way from color rendering, we let a single opaque Gaussian well fit a local surface region without the need of multiple overlapping Gaussians, hence largely reducing the memory and computation cost. For on-the-fly Gaussian optimization, we explicitly add Gaussians for three types of pixels per frame: newly observed, with large color errors, and with large depth errors. We also categorize all Gaussians into stable and unstable ones, where the stable Gaussians are expected to well fit previously observed RGBD images and otherwise unstable. We only optimize the unstable Gaussians and only render the pixels occupied by unstable Gaussians. In this way, both the number of Gaussians to be optimized and pixels to be rendered are largely reduced, and the optimization can be done in real time. We show real-time reconstructions of a variety of large scenes. Compared with the state-of-the-art NeRF-based RGBD SLAM, our system achieves comparable high-quality reconstruction but with around twice the speed and half the memory cost, and shows superior performance in the realism of novel view synthesis and camera tracking accuracy.
Understanding the Robustness of Skeleton-based Action Recognition under Adversarial Attack
Mar 18, 2021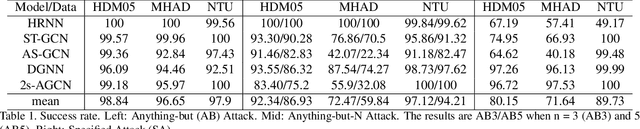
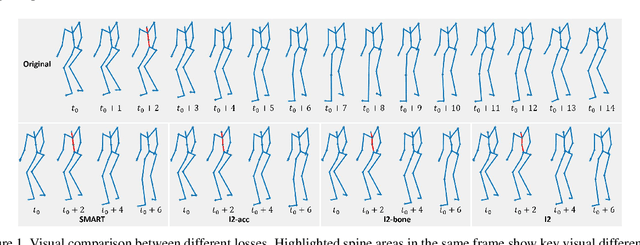
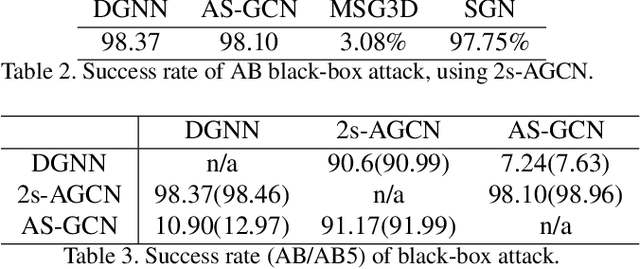
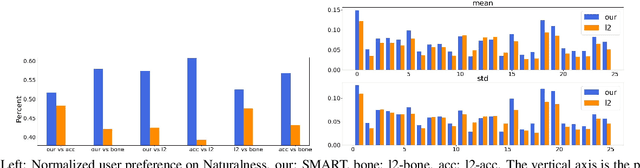
Action recognition has been heavily employed in many applications such as autonomous vehicles, surveillance, etc, where its robustness is a primary concern. In this paper, we examine the robustness of state-of-the-art action recognizers against adversarial attack, which has been rarely investigated so far. To this end, we propose a new method to attack action recognizers that rely on 3D skeletal motion. Our method involves an innovative perceptual loss that ensures the imperceptibility of the attack. Empirical studies demonstrate that our method is effective in both white-box and black-box scenarios. Its generalizability is evidenced on a variety of action recognizers and datasets. Its versatility is shown in different attacking strategies. Its deceitfulness is proven in extensive perceptual studies. Our method shows that adversarial attack on 3D skeletal motions, one type of time-series data, is significantly different from traditional adversarial attack problems. Its success raises serious concern on the robustness of action recognizers and provides insights on potential improvements.
SMART: Skeletal Motion Action Recognition aTtack
Nov 21, 2019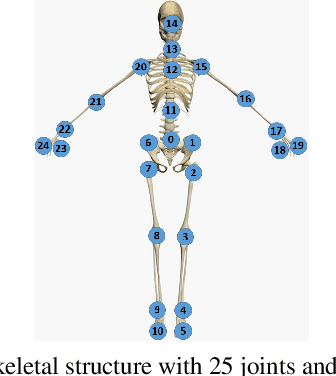


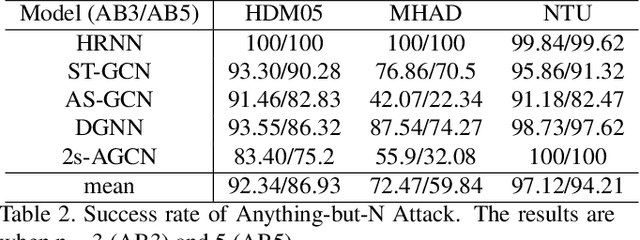
Adversarial attack has inspired great interest in computer vision, by showing that classification-based solutions are prone to imperceptible attack in many tasks. In this paper, we propose a method, SMART, to attack action recognizers which rely on 3D skeletal motions. Our method involves an innovative perceptual loss which ensures the imperceptibility of the attack. Empirical studies demonstrate that SMART is effective in both white-box and black-box scenarios. Its generalizability is evidenced on a variety of action recognizers and datasets. Its versatility is shown in different attacking strategies. Its deceitfulness is proven in extensive perceptual studies. Finally, SMART shows that adversarial attack on 3D skeletal motion, one type of time-series data, is significantly different from traditional adversarial attack problems.