 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUMC: A Unified Bandwidth-efficient and Multi-resolution based Collaborative Perception Framework
Mar 22, 2023


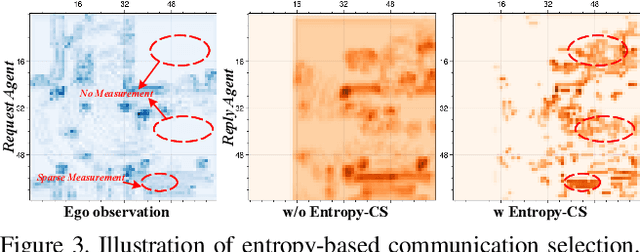
Multi-agent collaborative perception (MCP) has recently attracted much attention. It includes three key processes: communication for sharing, collaboration for integration, and reconstruction for different downstream tasks. Existing methods pursue designing the collaboration process alone, ignoring their intrinsic interactions and resulting in suboptimal performance. In contrast, we aim to propose a Unified Collaborative perception framework named UMC, optimizing the communication, collaboration, and reconstruction processes with the Multi-resolution technique. The communication introduces a novel trainable multi-resolution and selective-region (MRSR) mechanism, achieving higher quality and lower bandwidth. Then, a graph-based collaboration is proposed, conducting on each resolution to adapt the MRSR. Finally, the reconstruction integrates the multi-resolution collaborative features for downstream tasks. Since the general metric can not reflect the performance enhancement brought by MCP systematically, we introduce a brand-new evaluation metric that evaluates the MCP from different perspectives. To verify our algorithm, we conducted experiments on the V2X-Sim and OPV2V datasets. Our quantitative and qualitative experiments prove that the proposed UMC greatly outperforms the state-of-the-art collaborative perception approaches.
Neuromorphic Visual Odometry System for Intelligent Vehicle Application with Bio-inspired Vision Sensor
Sep 05, 2019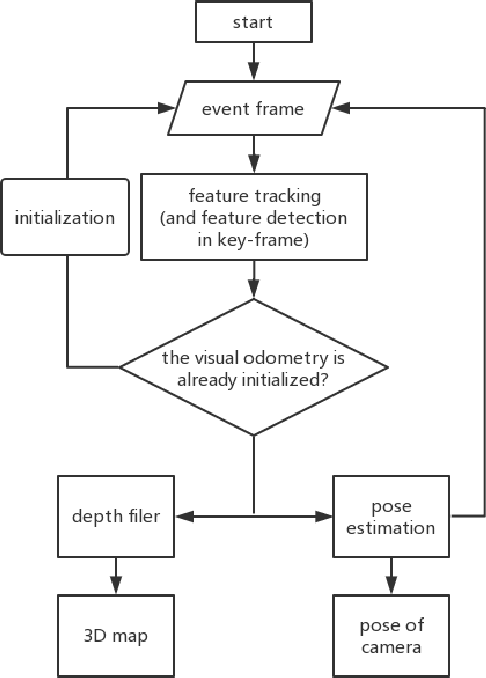
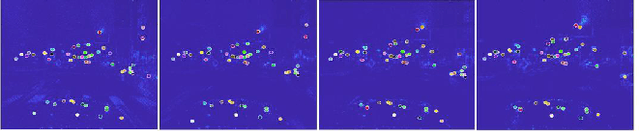
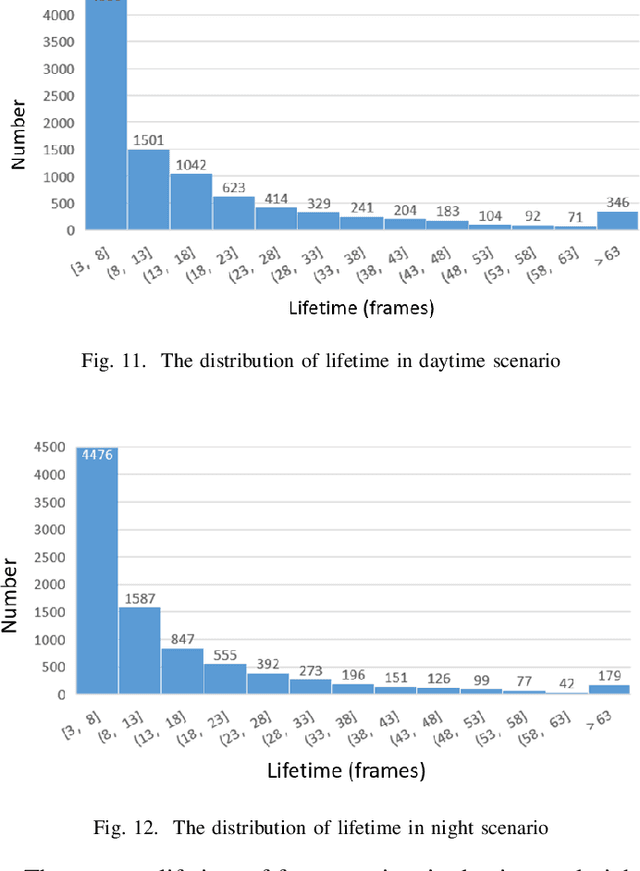
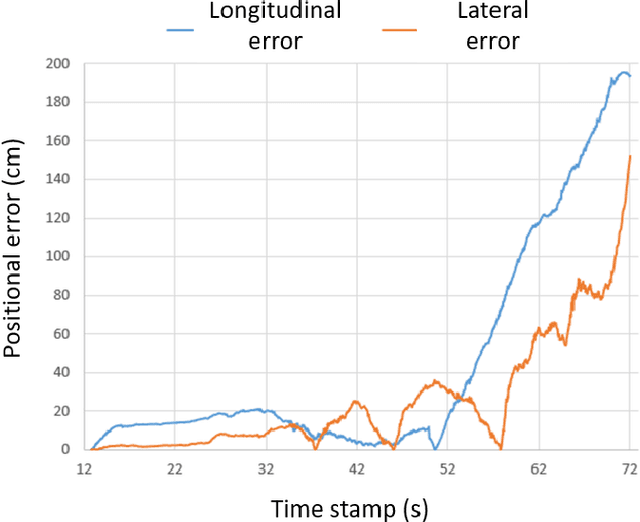
The neuromorphic camera is a brand new vision sensor that has emerged in recent years. In contrast to the conventional frame-based camera, the neuromorphic camera only transmits local pixel-level changes at the time of its occurrence and provides an asynchronous event stream with low latency. It has the advantages of extremely low signal delay, low transmission bandwidth requirements, rich information of edges, high dynamic range etc., which make it a promising sensor in the application of in-vehicle visual odometry system. This paper proposes a neuromorphic in-vehicle visual odometry system using feature tracking algorithm. To the best of our knowledge, this is the first in-vehicle visual odometry system that only uses a neuromorphic camera, and its performance test is carried out on actual driving datasets. In addition, an in-depth analysis of the results of the experiment is provided. The work of this paper verifies the feasibility of in-vehicle visual odometry system using neuromorphic cameras.