 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUniReason 1.0: A Unified Reasoning Framework for World Knowledge Aligned Image Generation and Editing
Feb 02, 2026Unified multimodal models often struggle with complex synthesis tasks that demand deep reasoning, and typically treat text-to-image generation and image editing as isolated capabilities rather than interconnected reasoning steps. To address this, we propose UniReason, a unified framework that harmonizes these two tasks through a dual reasoning paradigm. We formulate generation as world knowledge-enhanced planning to inject implicit constraints, and leverage editing capabilities for fine-grained visual refinement to further correct visual errors via self-reflection. This approach unifies generation and editing within a shared representation, mirroring the human cognitive process of planning followed by refinement. We support this framework by systematically constructing a large-scale reasoning-centric dataset (~300k samples) covering five major knowledge domains (e.g., cultural commonsense, physics, etc.) for planning, alongside an agent-generated corpus for visual self-correction. Extensive experiments demonstrate that UniReason achieves advanced performance on reasoning-intensive benchmarks such as WISE, KrisBench and UniREditBench, while maintaining superior general synthesis capabilities.
UrbanCraft: Urban View Extrapolation via Hierarchical Sem-Geometric Priors
May 29, 2025
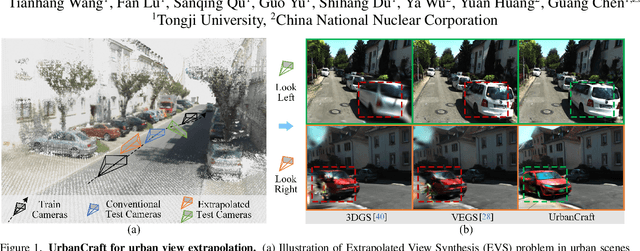
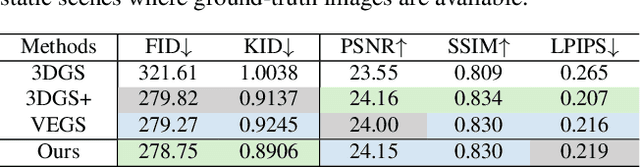
Existing neural rendering-based urban scene reconstruction methods mainly focus on the Interpolated View Synthesis (IVS) setting that synthesizes from views close to training camera trajectory. However, IVS can not guarantee the on-par performance of the novel view outside the training camera distribution (\textit{e.g.}, looking left, right, or downwards), which limits the generalizability of the urban reconstruction application. Previous methods have optimized it via image diffusion, but they fail to handle text-ambiguous or large unseen view angles due to coarse-grained control of text-only diffusion. In this paper, we design UrbanCraft, which surmounts the Extrapolated View Synthesis (EVS) problem using hierarchical sem-geometric representations serving as additional priors. Specifically, we leverage the partially observable scene to reconstruct coarse semantic and geometric primitives, establishing a coarse scene-level prior through an occupancy grid as the base representation. Additionally, we incorporate fine instance-level priors from 3D bounding boxes to enhance object-level details and spatial relationships. Building on this, we propose the \textbf{H}ierarchical \textbf{S}emantic-Geometric-\textbf{G}uided Variational Score Distillation (HSG-VSD), which integrates semantic and geometric constraints from pretrained UrbanCraft2D into the score distillation sampling process, forcing the distribution to be consistent with the observable scene. Qualitative and quantitative comparisons demonstrate the effectiveness of our methods on EVS problem.
RCDN: Towards Robust Camera-Insensitivity Collaborative Perception via Dynamic Feature-based 3D Neural Modeling
May 27, 2024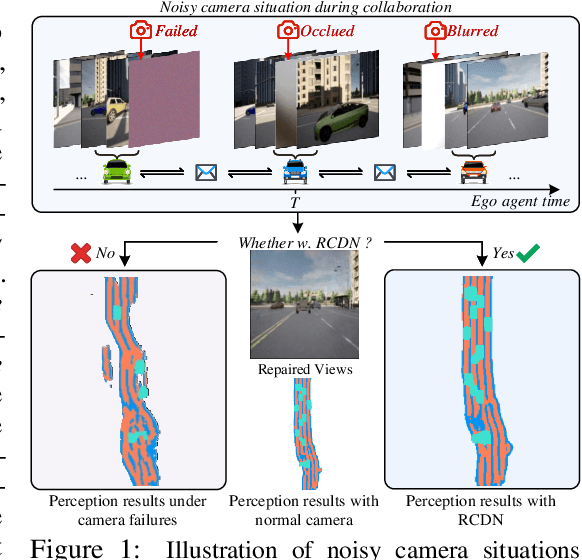
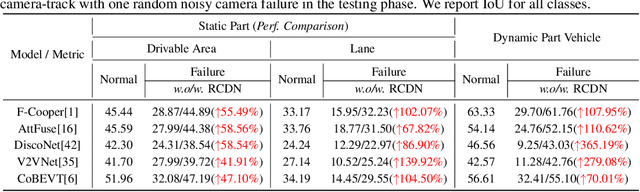
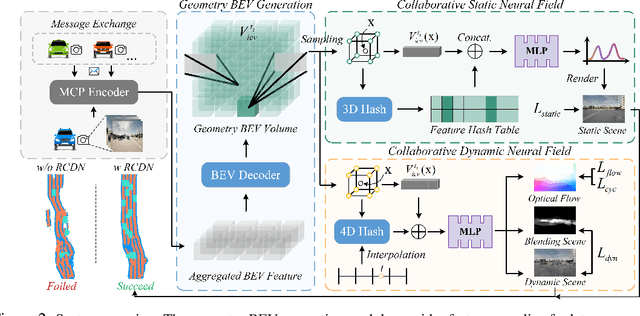
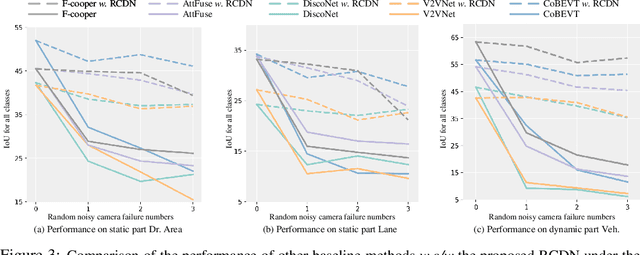
Collaborative perception is dedicated to tackling the constraints of single-agent perception, such as occlusions, based on the multiple agents' multi-view sensor inputs. However, most existing works assume an ideal condition that all agents' multi-view cameras are continuously available. In reality, cameras may be highly noisy, obscured or even failed during the collaboration. In this work, we introduce a new robust camera-insensitivity problem: how to overcome the issues caused by the failed camera perspectives, while stabilizing high collaborative performance with low calibration cost? To address above problems, we propose RCDN, a Robust Camera-insensitivity collaborative perception with a novel Dynamic feature-based 3D Neural modeling mechanism. The key intuition of RCDN is to construct collaborative neural rendering field representations to recover failed perceptual messages sent by multiple agents. To better model collaborative neural rendering field, RCDN first establishes a geometry BEV feature based time-invariant static field with other agents via fast hash grid modeling. Based on the static background field, the proposed time-varying dynamic field can model corresponding motion vectors for foregrounds with appropriate positions. To validate RCDN, we create OPV2V-N, a new large-scale dataset with manual labelling under different camera failed scenarios. Extensive experiments conducted on OPV2V-N show that RCDN can be ported to other baselines and improve their robustness in extreme camera-insensitivity settings. Our code and datasets will be available soon.
UMC: A Unified Bandwidth-efficient and Multi-resolution based Collaborative Perception Framework
Mar 22, 2023


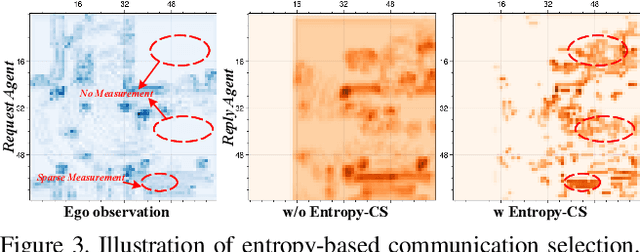
Multi-agent collaborative perception (MCP) has recently attracted much attention. It includes three key processes: communication for sharing, collaboration for integration, and reconstruction for different downstream tasks. Existing methods pursue designing the collaboration process alone, ignoring their intrinsic interactions and resulting in suboptimal performance. In contrast, we aim to propose a Unified Collaborative perception framework named UMC, optimizing the communication, collaboration, and reconstruction processes with the Multi-resolution technique. The communication introduces a novel trainable multi-resolution and selective-region (MRSR) mechanism, achieving higher quality and lower bandwidth. Then, a graph-based collaboration is proposed, conducting on each resolution to adapt the MRSR. Finally, the reconstruction integrates the multi-resolution collaborative features for downstream tasks. Since the general metric can not reflect the performance enhancement brought by MCP systematically, we introduce a brand-new evaluation metric that evaluates the MCP from different perspectives. To verify our algorithm, we conducted experiments on the V2X-Sim and OPV2V datasets. Our quantitative and qualitative experiments prove that the proposed UMC greatly outperforms the state-of-the-art collaborative perception approaches.