 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHUNTER: Unsupervised Human-centric 3D Detection via Transferring Knowledge from Synthetic Instances to Real Scenes
Mar 15, 2024



Human-centric 3D scene understanding has recently drawn increasing attention, driven by its critical impact on robotics. However, human-centric real-life scenarios are extremely diverse and complicated, and humans have intricate motions and interactions. With limited labeled data, supervised methods are difficult to generalize to general scenarios, hindering real-life applications. Mimicking human intelligence, we propose an unsupervised 3D detection method for human-centric scenarios by transferring the knowledge from synthetic human instances to real scenes. To bridge the gap between the distinct data representations and feature distributions of synthetic models and real point clouds, we introduce novel modules for effective instance-to-scene representation transfer and synthetic-to-real feature alignment. Remarkably, our method exhibits superior performance compared to current state-of-the-art techniques, achieving 87.8% improvement in mAP and closely approaching the performance of fully supervised methods (62.15 mAP vs. 69.02 mAP) on HuCenLife Dataset.
When Mining Electric Locomotives Meet Reinforcement Learning
Nov 14, 2023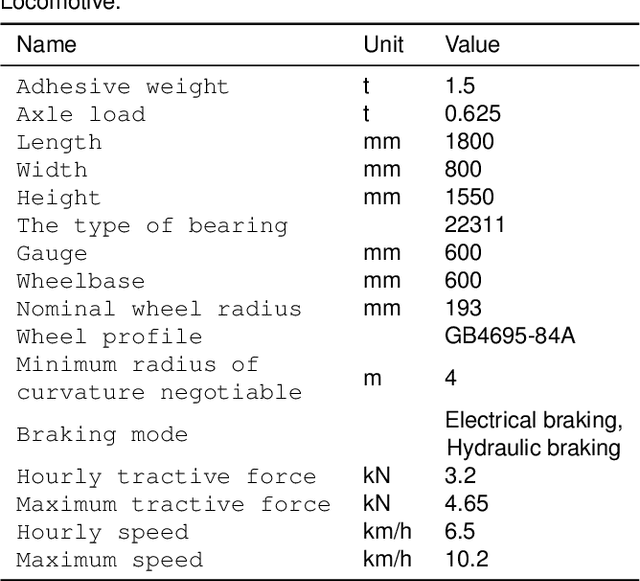
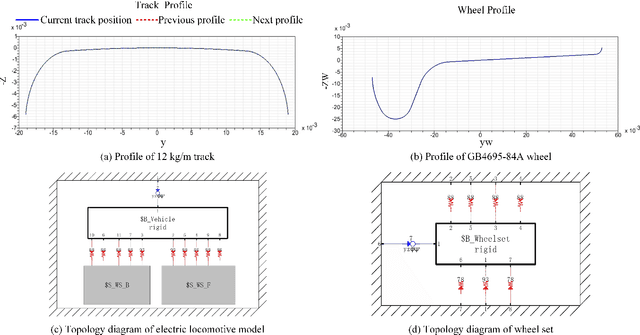
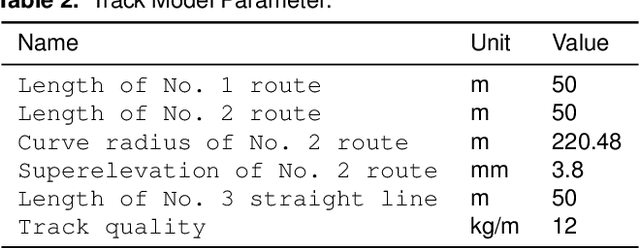
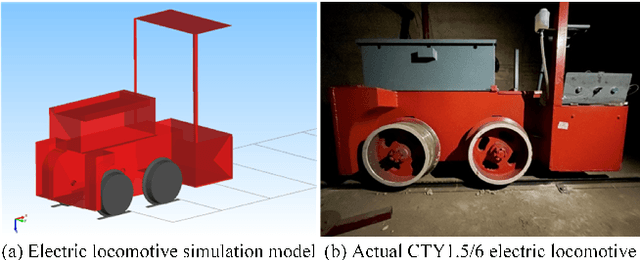
As the most important auxiliary transportation equipment in coal mines, mining electric locomotives are mostly operated manually at present. However, due to the complex and ever-changing coal mine environment, electric locomotive safety accidents occur frequently these years. A mining electric locomotive control method that can adapt to different complex mining environments is needed. Reinforcement Learning (RL) is concerned with how artificial agents ought to take actions in an environment so as to maximize reward, which can help achieve automatic control of mining electric locomotive. In this paper, we present how to apply RL to the autonomous control of mining electric locomotives. To achieve more precise control, we further propose an improved epsilon-greedy (IEG) algorithm which can better balance the exploration and exploitation. To verify the effectiveness of this method, a co-simulation platform for autonomous control of mining electric locomotives is built which can complete closed-loop simulation of the vehicles. The simulation results show that this method ensures the locomotives following the front vehicle safely and responding promptly in the event of sudden obstacles on the road when the vehicle in complex and uncertain coal mine environments.
Bearing fault diagnosis based on spectrum images of vibration signals
Feb 04, 2016


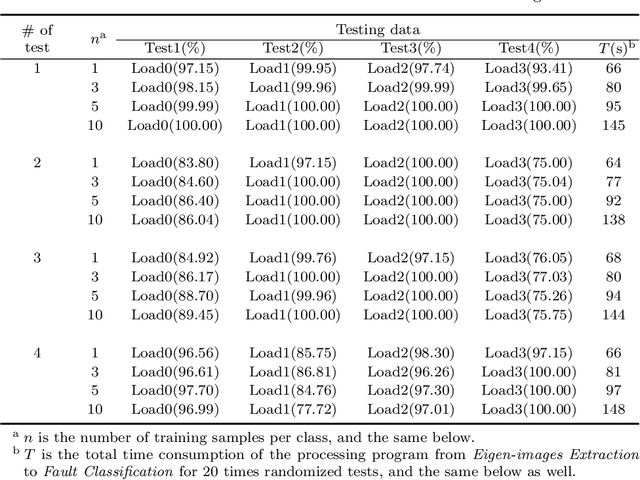
Bearing fault diagnosis has been a challenge in the monitoring activities of rotating machinery, and it's receiving more and more attention. The conventional fault diagnosis methods usually extract features from the waveforms or spectrums of vibration signals in order to realize fault classification. In this paper, a novel feature in the form of images is presented, namely the spectrum images of vibration signals. The spectrum images are simply obtained by doing fast Fourier transformation. Such images are processed with two-dimensional principal component analysis (2DPCA) to reduce the dimensions, and then a minimum distance method is applied to classify the faults of bearings. The effectiveness of the proposed method is verified with experimental data.