 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePromptTea: Let Prompts Tell TeaCache the Optimal Threshold
Jul 09, 2025Despite recent progress in video generation, inference speed remains a major bottleneck. A common acceleration strategy involves reusing model outputs via caching mechanisms at fixed intervals. However, we find that such fixed-frequency reuse significantly degrades quality in complex scenes, while manually tuning reuse thresholds is inefficient and lacks robustness. To address this, we propose Prompt-Complexity-Aware (PCA) caching, a method that automatically adjusts reuse thresholds based on scene complexity estimated directly from the input prompt. By incorporating prompt-derived semantic cues, PCA enables more adaptive and informed reuse decisions than conventional caching methods. We also revisit the assumptions behind TeaCache and identify a key limitation: it suffers from poor input-output relationship modeling due to an oversimplified prior. To overcome this, we decouple the noisy input, enhance the contribution of meaningful textual information, and improve the model's predictive accuracy through multivariate polynomial feature expansion. To further reduce computational cost, we replace the static CFGCache with DynCFGCache, a dynamic mechanism that selectively reuses classifier-free guidance (CFG) outputs based on estimated output variations. This allows for more flexible reuse without compromising output quality. Extensive experiments demonstrate that our approach achieves significant acceleration-for example, 2.79x speedup on the Wan2.1 model-while maintaining high visual fidelity across a range of scenes.
DualAttWaveNet: Multiscale Attention Networks for Satellite Interference Detection
Apr 24, 2025The escalating overlap between non-geostationary orbit (NGSO) and geostationary orbit (GSO) satellite frequency allocations necessitates accurate interference detection methods that address two pivotal technical gaps: computationally efficient signal analysis for real-time operation, and robust anomaly discrimination under varying interference patterns. Existing deep learning approaches employ encoder-decoder anomaly detectors that threshold input-output discrepancies for robustness. While the transformer-based TrID model achieves state-of-the-art performance (AUC: 0.8318, F1: 0.8321), its multi-head attention incurs prohibitive computation time, and its decoupled training of time-frequency models overlooks cross-domain dependencies. To overcome these problems, we propose DualAttWaveNet. A bidirectional attention fusion layer dynamically correlates time-domain samples using parameter-efficient cross-attention routing. A wavelet-regularized reconstruction loss enforces multi-scale consistency. We train the model on public dataset which consists of 48 hours of satellite signals. Experiments show that compared to TrID, DualAttWaveNet improves AUC by 12% and reduces inference time by 50% to 540ms per batch while maintaining F1-score.
CTSAC: Curriculum-Based Transformer Soft Actor-Critic for Goal-Oriented Robot Exploration
Mar 18, 2025
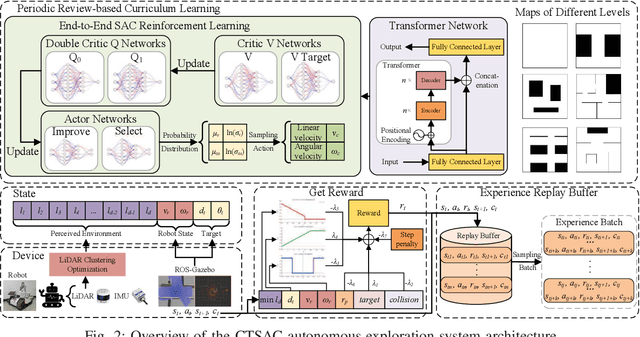


With the increasing demand for efficient and flexible robotic exploration solutions, Reinforcement Learning (RL) is becoming a promising approach in the field of autonomous robotic exploration. However, current RL-based exploration algorithms often face limited environmental reasoning capabilities, slow convergence rates, and substantial challenges in Sim-To-Real (S2R) transfer. To address these issues, we propose a Curriculum Learning-based Transformer Reinforcement Learning Algorithm (CTSAC) aimed at improving both exploration efficiency and transfer performance. To enhance the robot's reasoning ability, a Transformer is integrated into the perception network of the Soft Actor-Critic (SAC) framework, leveraging historical information to improve the farsightedness of the strategy. A periodic review-based curriculum learning is proposed, which enhances training efficiency while mitigating catastrophic forgetting during curriculum transitions. Training is conducted on the ROS-Gazebo continuous robotic simulation platform, with LiDAR clustering optimization to further reduce the S2R gap. Experimental results demonstrate the CTSAC algorithm outperforms the state-of-the-art non-learning and learning-based algorithms in terms of success rate and success rate-weighted exploration time. Moreover, real-world experiments validate the strong S2R transfer capabilities of CTSAC.
When Mining Electric Locomotives Meet Reinforcement Learning
Nov 14, 2023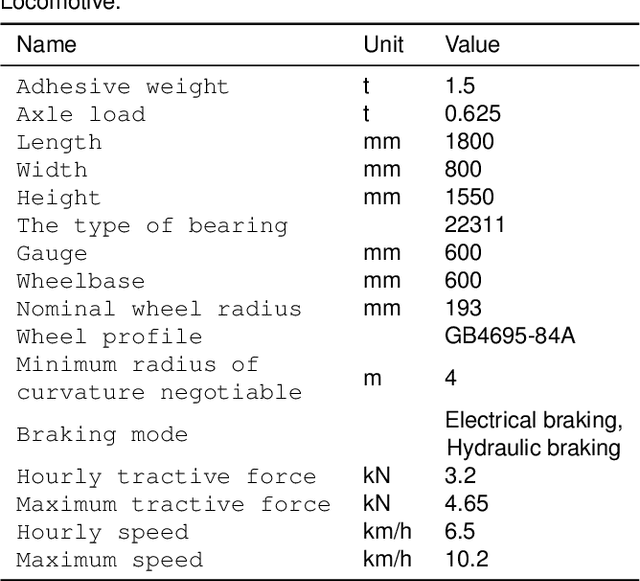
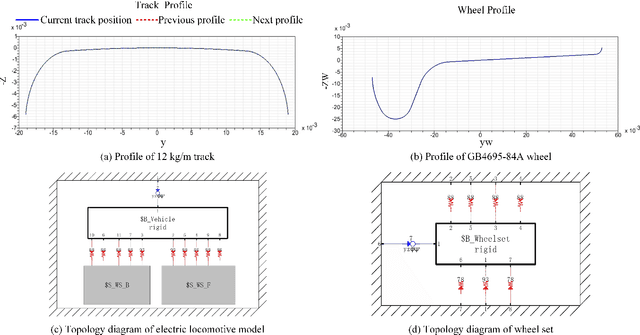
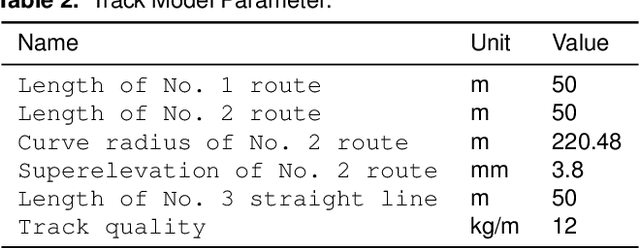
As the most important auxiliary transportation equipment in coal mines, mining electric locomotives are mostly operated manually at present. However, due to the complex and ever-changing coal mine environment, electric locomotive safety accidents occur frequently these years. A mining electric locomotive control method that can adapt to different complex mining environments is needed. Reinforcement Learning (RL) is concerned with how artificial agents ought to take actions in an environment so as to maximize reward, which can help achieve automatic control of mining electric locomotive. In this paper, we present how to apply RL to the autonomous control of mining electric locomotives. To achieve more precise control, we further propose an improved epsilon-greedy (IEG) algorithm which can better balance the exploration and exploitation. To verify the effectiveness of this method, a co-simulation platform for autonomous control of mining electric locomotives is built which can complete closed-loop simulation of the vehicles. The simulation results show that this method ensures the locomotives following the front vehicle safely and responding promptly in the event of sudden obstacles on the road when the vehicle in complex and uncertain coal mine environments.