 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdaptive Planning Framework for UAV-Based Surface Inspection in Partially Unknown Indoor Environments
Apr 12, 2025



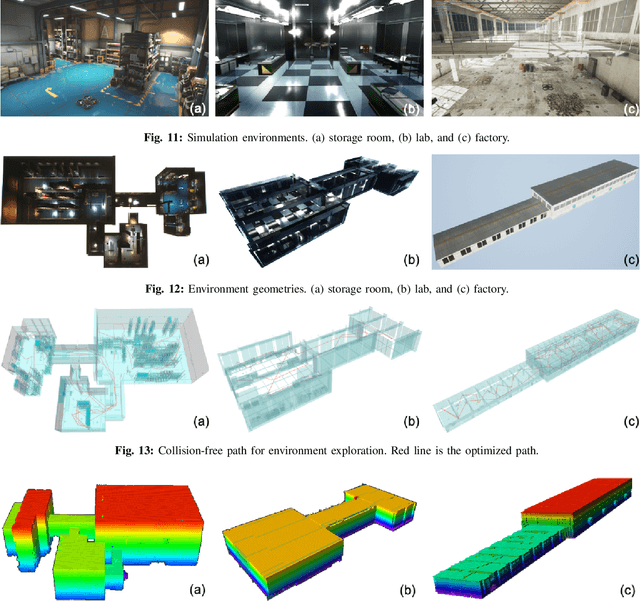
Inspecting indoor environments such as tunnels, industrial facilities, and construction sites is essential for infrastructure monitoring and maintenance. While manual inspection in these environments is often time-consuming and potentially hazardous, Unmanned Aerial Vehicles (UAVs) can improve efficiency by autonomously handling inspection tasks. Such inspection tasks usually rely on reference maps for coverage planning. However, in industrial applications, only the floor plans are typically available. The unforeseen obstacles not included in the floor plans will result in outdated reference maps and inefficient or unsafe inspection trajectories. In this work, we propose an adaptive inspection framework that integrates global coverage planning with local reactive adaptation to improve the coverage and efficiency of UAV-based inspection in partially unknown indoor environments. Experimental results in structured indoor scenarios demonstrate the effectiveness of the proposed approach in inspection efficiency and achieving high coverage rates with adaptive obstacle handling, highlighting its potential for enhancing the efficiency of indoor facility inspection.
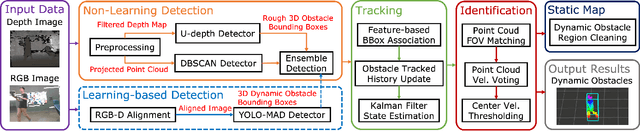
LV-DOT: LiDAR-visual dynamic obstacle detection and tracking for autonomous robot navigation
Feb 28, 2025


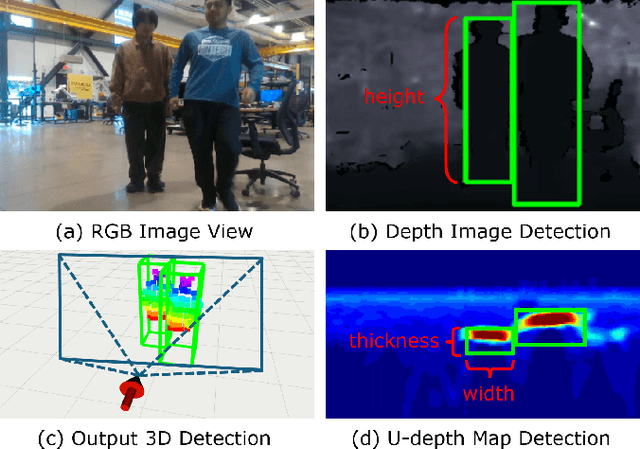
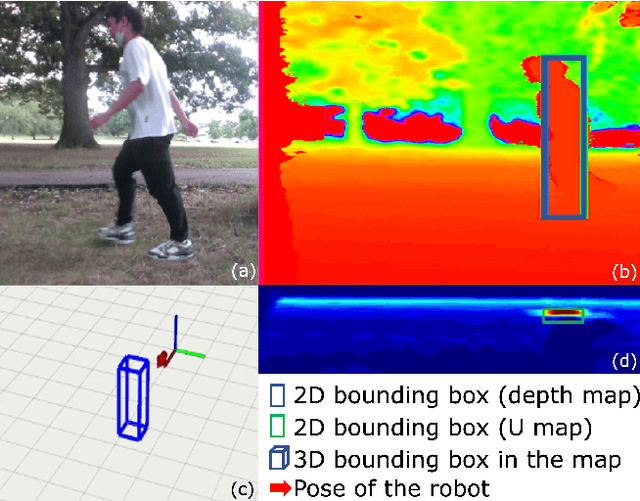
Accurate perception of dynamic obstacles is essential for autonomous robot navigation in indoor environments. Although sophisticated 3D object detection and tracking methods have been investigated and developed thoroughly in the fields of computer vision and autonomous driving, their demands on expensive and high-accuracy sensor setups and substantial computational resources from large neural networks make them unsuitable for indoor robotics. Recently, more lightweight perception algorithms leveraging onboard cameras or LiDAR sensors have emerged as promising alternatives. However, relying on a single sensor poses significant limitations: cameras have limited fields of view and can suffer from high noise, whereas LiDAR sensors operate at lower frequencies and lack the richness of visual features. To address this limitation, we propose a dynamic obstacle detection and tracking framework that uses both onboard camera and LiDAR data to enable lightweight and accurate perception. Our proposed method expands on our previous ensemble detection approach, which integrates outputs from multiple low-accuracy but computationally efficient detectors to ensure real-time performance on the onboard computer. In this work, we propose a more robust fusion strategy that integrates both LiDAR and visual data to enhance detection accuracy further. We then utilize a tracking module that adopts feature-based object association and the Kalman filter to track and estimate detected obstacles' states. Besides, a dynamic obstacle classification algorithm is designed to robustly identify moving objects. The dataset evaluation demonstrates a better perception performance compared to benchmark methods. The physical experiments on a quadcopter robot confirms the feasibility for real-world navigation.
Heuristic-based Incremental Probabilistic Roadmap for Efficient UAV Exploration in Dynamic Environments
Sep 17, 2023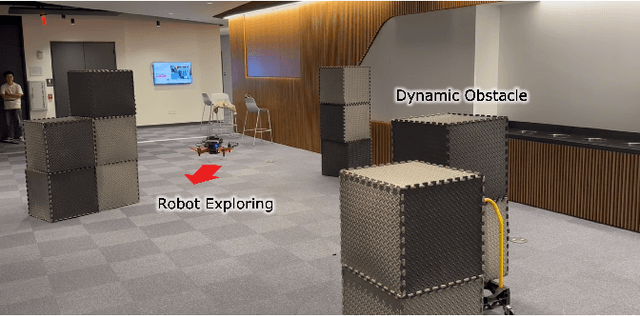
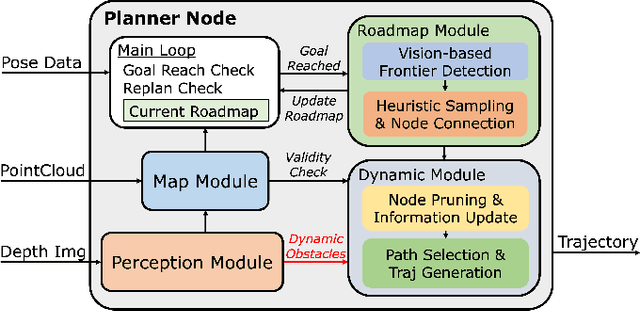
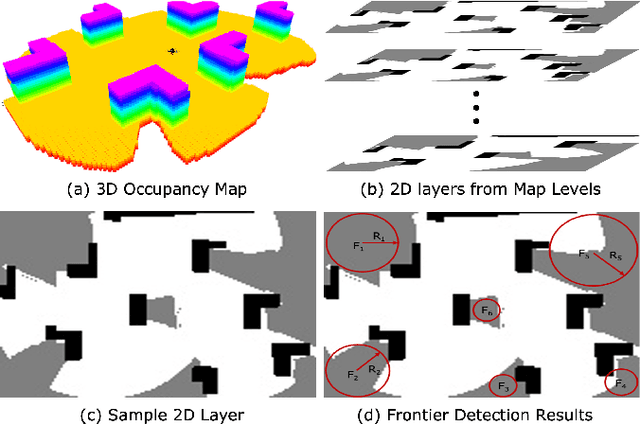
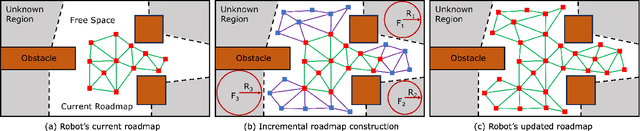
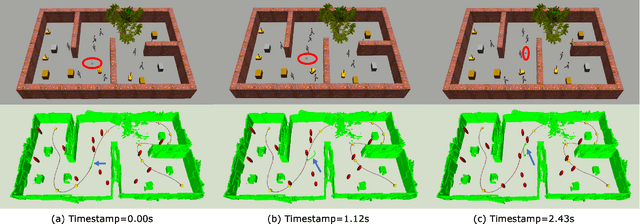
Autonomous exploration in dynamic environments necessitates a planner that can proactively respond to changes and make efficient and safe decisions for robots. Although plenty of sampling-based works have shown success in exploring static environments, their inherent sampling randomness and limited utilization of previous samples often result in sub-optimal exploration efficiency. Additionally, most of these methods struggle with efficient replanning and collision avoidance in dynamic settings. To overcome these limitations, we propose the Heuristic-based Incremental Probabilistic Roadmap Exploration (HIRE) planner for UAVs exploring dynamic environments. The proposed planner adopts an incremental sampling strategy based on the probabilistic roadmap constructed by heuristic sampling toward the unexplored region next to the free space, defined as the heuristic frontier regions. The heuristic frontier regions are detected by applying a lightweight vision-based method to the different levels of the occupancy map. Moreover, our dynamic module ensures that the planner dynamically updates roadmap information based on the environment changes and avoids dynamic obstacles. Simulation and physical experiments prove that our planner can efficiently and safely explore dynamic environments.
Quadcopter Trajectory Time Minimization and Robust Collision Avoidance via Optimal Time Allocation
Sep 15, 2023



Autonomous navigation requires robots to generate trajectories for collision avoidance efficiently. Although plenty of previous works have proven successful in generating smooth and spatially collision-free trajectories, their solutions often suffer from suboptimal time efficiency and potential unsafety, particularly when accounting for uncertainties in robot perception and control. To address this issue, this paper presents the Robust Optimal Time Allocation (ROTA) framework. This framework is designed to optimize the time progress of the trajectories temporally, serving as a post-processing tool to enhance trajectory time efficiency and safety under uncertainties. In this study, we begin by formulating a non-convex optimization problem aimed at minimizing trajectory execution time while incorporating constraints on collision probability as the robot approaches obstacles. Subsequently, we introduce the concept of the trajectory braking zone and adopt the chance-constrained formulation for robust collision avoidance in the braking zones. Finally, the non-convex optimization problem is reformulated into a second-order cone programming problem to achieve real-time performance. Through simulations and physical flight experiments, we demonstrate that the proposed approach effectively reduces trajectory execution time while enabling robust collision avoidance in complex environments.
Onboard dynamic-object detection and tracking for autonomous robot navigation with RGB-D camera
Feb 28, 2023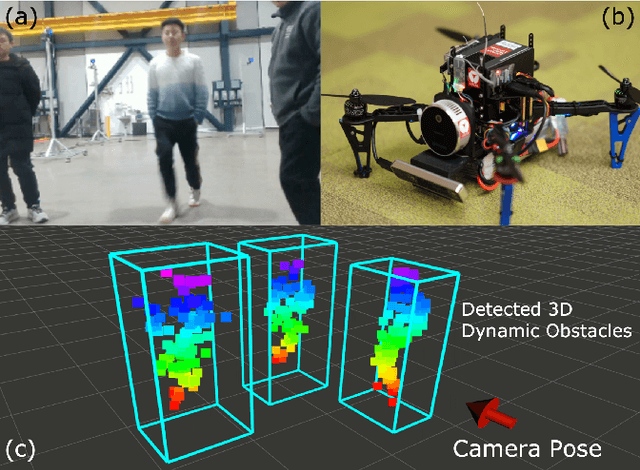
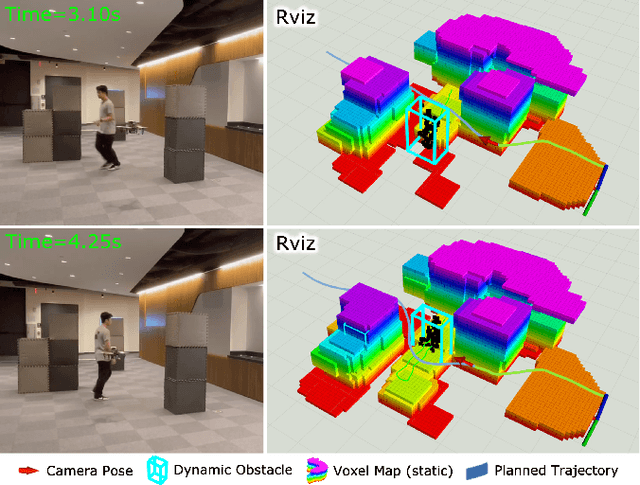
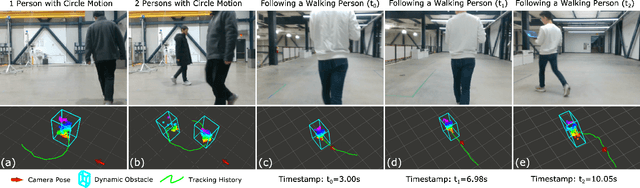
Deploying autonomous robots in crowded indoor environments usually requires them to have accurate dynamic obstacle perception. Although plenty of previous works in the autonomous driving field have investigated the 3D object detection problem, the usage of dense point clouds from a heavy LiDAR and their high computation cost for learning-based data processing make those methods not applicable to lightweight robots, such as vision-based UAVs with small onboard computers. To address this issue, we propose a lightweight 3D dynamic obstacle detection and tracking (DODT) method based on an RGB-D camera. Our method adopts a novel ensemble detection strategy, combining multiple computationally efficient but low-accuracy detectors to achieve real-time high-accuracy obstacle detection. Besides, we introduce a new feature-based data association method to prevent mismatches and use the Kalman filter with the constant acceleration model to track detected obstacles. In addition, our system includes an optional and auxiliary learning-based module to enhance the obstacle detection range and dynamic obstacle identification. The users can determine whether or not to run this module based on the available computation resources. The proposed method is implemented in a lightweight quadcopter, and the experiments prove that the algorithm can make the robot detect dynamic obstacles and navigate dynamic environments safely.
A vision-based autonomous UAV inspection framework for unknown tunnel construction sites with dynamic obstacles
Jan 20, 2023Tunnel construction using the drill-and-blast method requires the 3D measurement of the excavation front to evaluate underbreak locations. Considering the inspection and measurement task's safety, cost, and efficiency, deploying lightweight autonomous robots, such as unmanned aerial vehicles (UAV), becomes more necessary and popular. Most of the previous works use a prior map for inspection viewpoint determination and do not consider dynamic obstacles. To maximally increase the level of autonomy, this paper proposes a vision-based UAV inspection framework for dynamic tunnel environments without using a prior map. Our approach utilizes a hierarchical planning scheme, decomposing the inspection problem into different levels. The high-level decision maker first determines the task for the robot and generates the target point. Then, the mid-level path planner finds the waypoint path and optimizes the collision-free static trajectory. Finally, the static trajectory will be fed into the low-level local planner to avoid dynamic obstacles and navigate to the target point. Besides, our framework contains a novel dynamic map module that can simultaneously track dynamic obstacles and represent static obstacles based on an RGB-D camera. After inspection, the Structure-from-Motion (SfM) pipeline is applied to generate the 3D shape of the target. To our best knowledge, this is the first time autonomous inspection has been realized in unknown and dynamic tunnel environments. Our flight experiments in a real tunnel prove that our method can autonomously inspect the tunnel excavation front surface.
A real-time dynamic obstacle tracking and mapping system for UAV navigation and collision avoidance with an RGB-D camera
Sep 17, 2022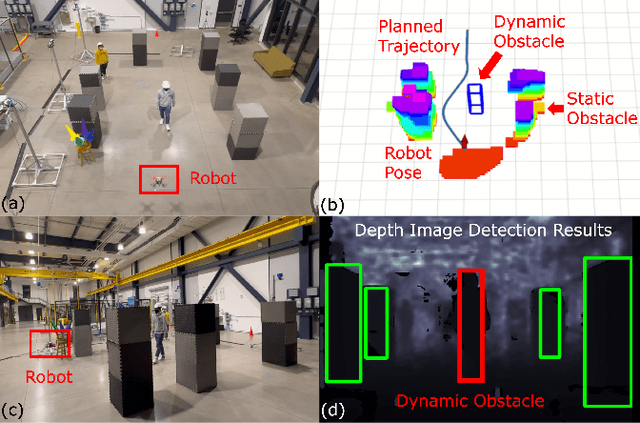
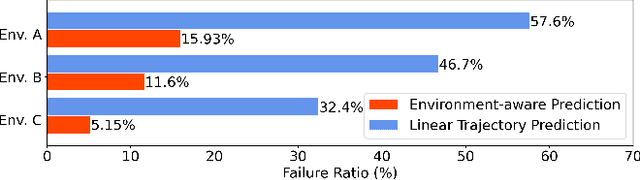
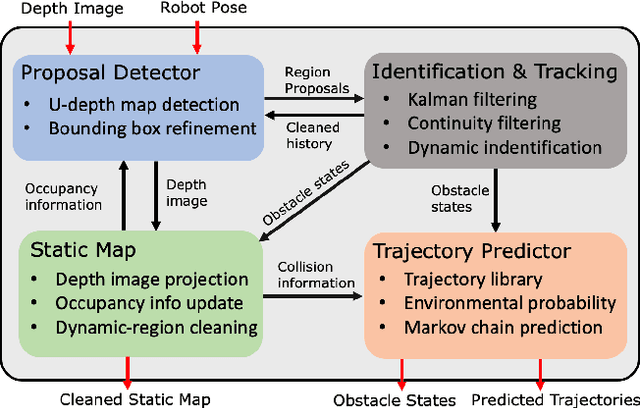
The real-time dynamic environment perception has become vital for autonomous robots in crowded spaces. Although the popular voxel-based mapping methods can efficiently represent 3D obstacles with arbitrarily complex shapes, they can hardly distinguish between static and dynamic obstacles, leading to the limited performance of obstacle avoidance. While plenty of sophisticated learning-based dynamic obstacle detection algorithms exist in autonomous driving, the quadcopter's limited computation resources cannot achieve real-time performance using those approaches. To address these issues, we propose a real-time dynamic obstacle tracking and mapping system for quadcopter obstacle avoidance using an RGB-D camera. The proposed system first utilizes a depth image with an occupancy voxel map to generate potential dynamic obstacle regions as proposals. With the obstacle region proposals, the Kalman filter and our continuity filter are applied to track each dynamic obstacle. Finally, the environment-aware trajectory prediction method is proposed based on the Markov chain using the states of tracked dynamic obstacles. We implemented the proposed system with our custom quadcopter and navigation planner. The simulation and physical experiments show that our methods can successfully track and represent obstacles in dynamic environments in real-time and safely avoid obstacles.
Vision-aided UAV Navigation and Dynamic Obstacle Avoidance using Gradient-based B-spline Trajectory Optimization
Sep 15, 2022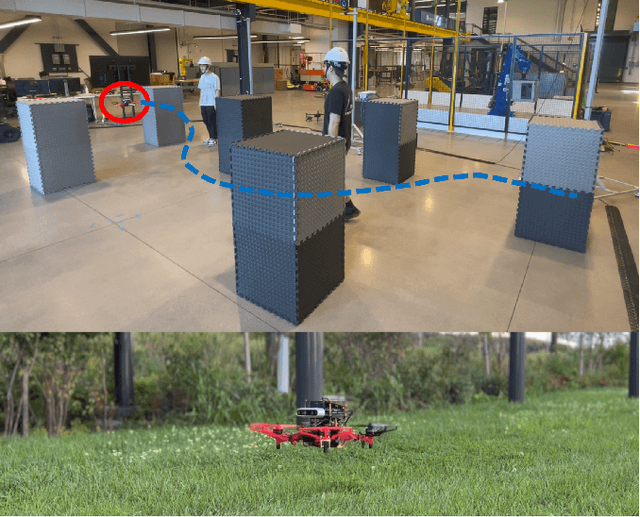


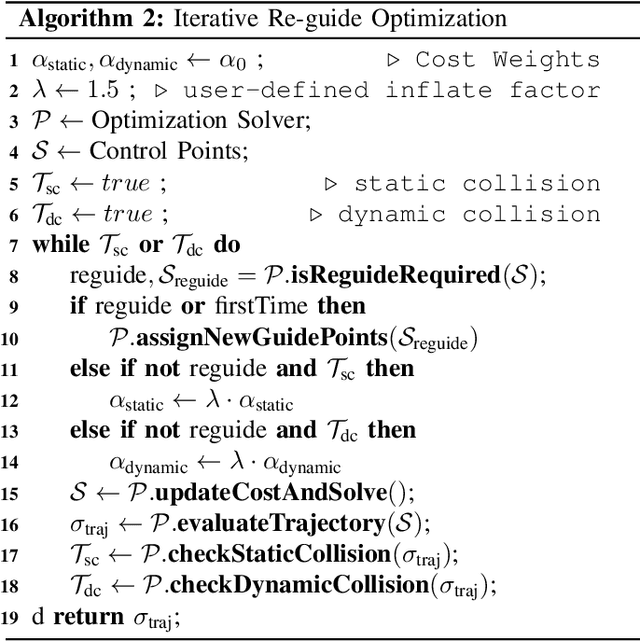
Navigating dynamic environments requires the robot to generate collision-free trajectories and actively avoid moving obstacles. Most previous works designed path planning algorithms based on one single map representation, such as the geometric, occupancy, or ESDF map. Although they have shown success in static environments, due to the limitation of map representation, those methods cannot reliably handle static and dynamic obstacles simultaneously. To address the problem, this paper proposes a gradient-based B-spline trajectory optimization algorithm utilizing the robot's onboard vision. The depth vision enables the robot to track and represent dynamic objects geometrically based on the voxel map. The proposed optimization first adopts the circle-based guide-point algorithm to approximate the costs and gradients for avoiding static obstacles. Then, with the vision-detected moving objects, our receding-horizon distance field is simultaneously used to prevent dynamic collisions. Finally, the iterative re-guide strategy is applied to generate the collision-free trajectory. The simulation and physical experiments prove that our method can run in real-time to navigate dynamic environments safely.
DPMPC-Planner: A real-time UAV trajectory planning framework for complex static environments with dynamic obstacles
Sep 14, 2021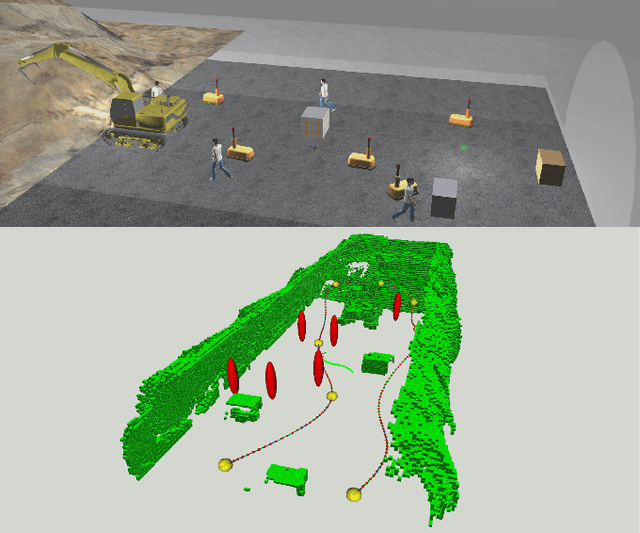


Safe UAV navigation is challenging due to the complex environment structures, dynamic obstacles, and uncertainties from measurement noises and unpredictable moving obstacle behaviors. Although plenty of recent works achieve safe navigation in complex static environments with sophisticated mapping algorithms, such as occupancy map and ESDF map, these methods cannot reliably handle dynamic environments due to the mapping limitation from moving obstacles. To address the limitation, this paper proposes a trajectory planning framework to achieve safe navigation considering complex static environments with dynamic obstacles. To reliably handle dynamic obstacles, we divide the environment representation into static mapping and dynamic object representation, which can be obtained from computer vision methods. Our framework first generates a static trajectory based on the proposed iterative corridor shrinking algorithm. Then, reactive chance-constrained model predictive control with temporal goal tracking is applied to avoid dynamic obstacles with uncertainties. The simulation results in various environments demonstrate the ability of our algorithm to navigate safely in complex static environments with dynamic obstacles.
Frontier-based Automatic-differentiable Information Gain Measure for Robotic Exploration of Unknown 3D Environments
Nov 10, 2020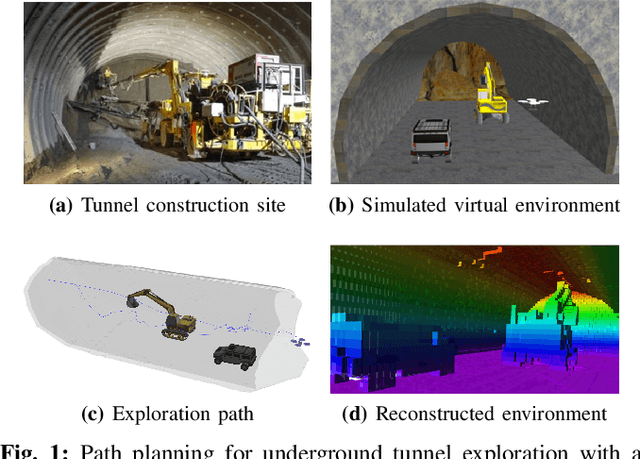
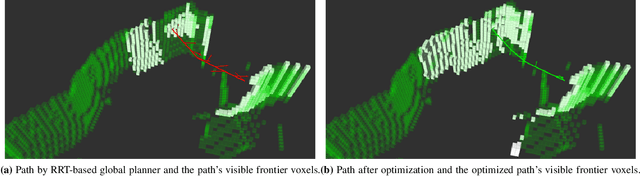

The path planning problem for autonomous exploration of an unknown region by a robotic agent typically employs frontier-based or information-theoretic heuristics. Frontier-based heuristics typically evaluate the information gain of a viewpoint by the number of visible frontier voxels, which is a discrete measure that can only be optimized by sampling. On the other hand, information-theoretic heuristics compute information gain as the mutual information between the map and the sensor's measurement. Although the gradient of such measures can be computed, the computation involves costly numerical differentiation. In this work, we add a novel fuzzy logic filter in the counting of visible frontier voxels surrounding a viewpoint, which allows the gradient of the information gain with respect to the viewpoint to be efficiently computed using automatic differentiation. This enables us to simultaneously optimize information gain with other differentiable quality measures such as path length. Using multiple simulation environments, we demonstrate that the proposed gradient-based optimization method consistently improves the information gain and other quality measures of exploration paths.