 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVision-aided UAV Navigation and Dynamic Obstacle Avoidance using Gradient-based B-spline Trajectory Optimization
Paper and Code
Sep 15, 2022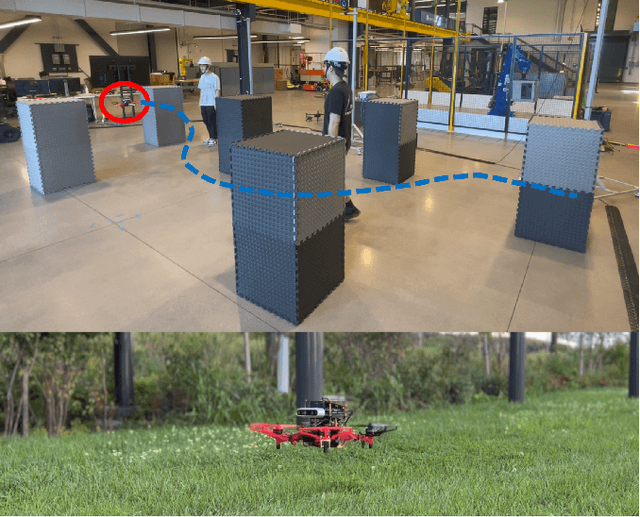


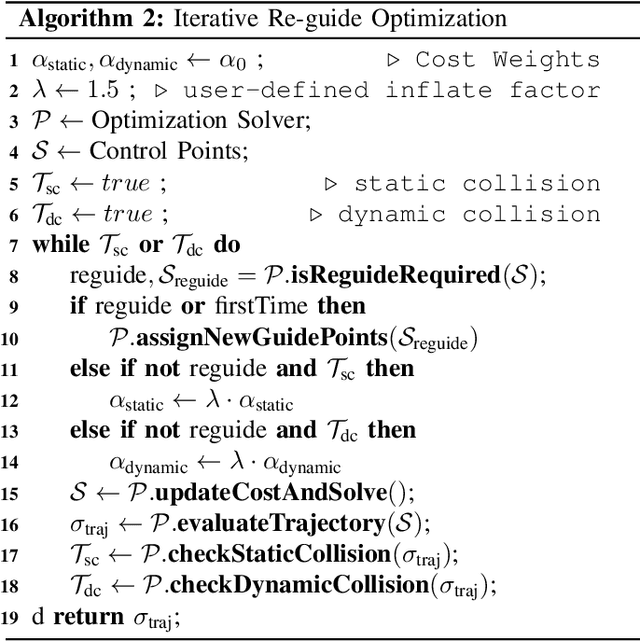
Navigating dynamic environments requires the robot to generate collision-free trajectories and actively avoid moving obstacles. Most previous works designed path planning algorithms based on one single map representation, such as the geometric, occupancy, or ESDF map. Although they have shown success in static environments, due to the limitation of map representation, those methods cannot reliably handle static and dynamic obstacles simultaneously. To address the problem, this paper proposes a gradient-based B-spline trajectory optimization algorithm utilizing the robot's onboard vision. The depth vision enables the robot to track and represent dynamic objects geometrically based on the voxel map. The proposed optimization first adopts the circle-based guide-point algorithm to approximate the costs and gradients for avoiding static obstacles. Then, with the vision-detected moving objects, our receding-horizon distance field is simultaneously used to prevent dynamic collisions. Finally, the iterative re-guide strategy is applied to generate the collision-free trajectory. The simulation and physical experiments prove that our method can run in real-time to navigate dynamic environments safely.