 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA vision-based autonomous UAV inspection framework for unknown tunnel construction sites with dynamic obstacles
Jan 20, 2023Tunnel construction using the drill-and-blast method requires the 3D measurement of the excavation front to evaluate underbreak locations. Considering the inspection and measurement task's safety, cost, and efficiency, deploying lightweight autonomous robots, such as unmanned aerial vehicles (UAV), becomes more necessary and popular. Most of the previous works use a prior map for inspection viewpoint determination and do not consider dynamic obstacles. To maximally increase the level of autonomy, this paper proposes a vision-based UAV inspection framework for dynamic tunnel environments without using a prior map. Our approach utilizes a hierarchical planning scheme, decomposing the inspection problem into different levels. The high-level decision maker first determines the task for the robot and generates the target point. Then, the mid-level path planner finds the waypoint path and optimizes the collision-free static trajectory. Finally, the static trajectory will be fed into the low-level local planner to avoid dynamic obstacles and navigate to the target point. Besides, our framework contains a novel dynamic map module that can simultaneously track dynamic obstacles and represent static obstacles based on an RGB-D camera. After inspection, the Structure-from-Motion (SfM) pipeline is applied to generate the 3D shape of the target. To our best knowledge, this is the first time autonomous inspection has been realized in unknown and dynamic tunnel environments. Our flight experiments in a real tunnel prove that our method can autonomously inspect the tunnel excavation front surface.
A real-time dynamic obstacle tracking and mapping system for UAV navigation and collision avoidance with an RGB-D camera
Sep 17, 2022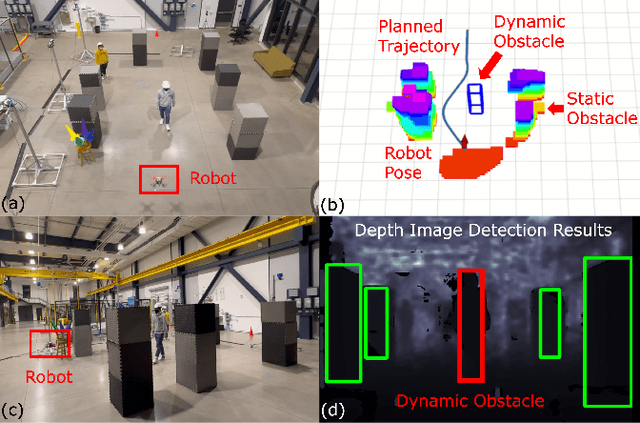
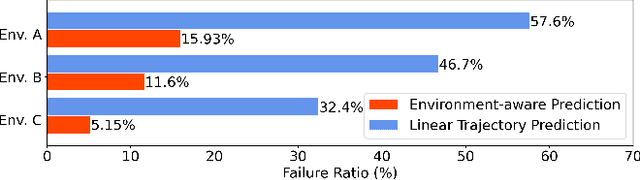
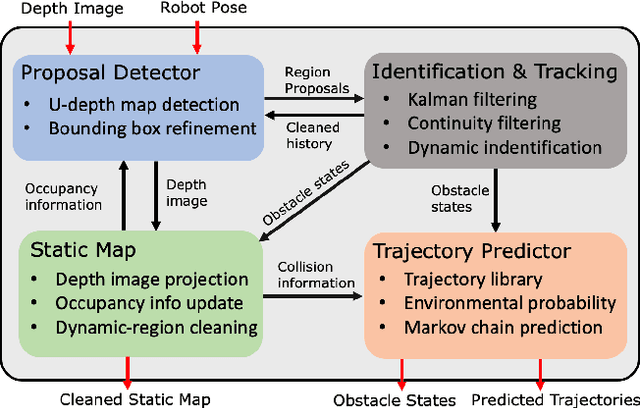
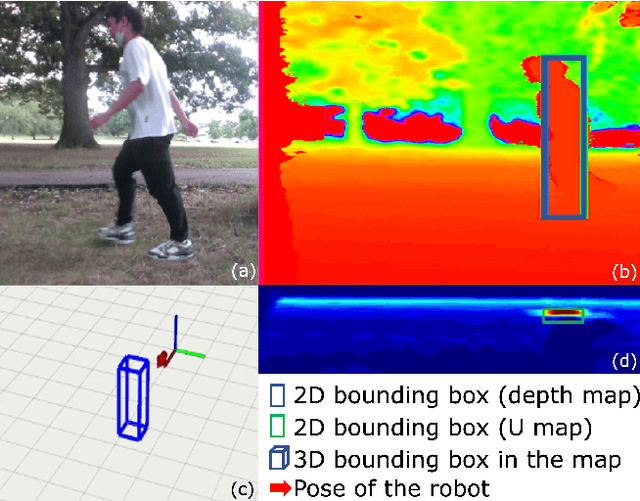
The real-time dynamic environment perception has become vital for autonomous robots in crowded spaces. Although the popular voxel-based mapping methods can efficiently represent 3D obstacles with arbitrarily complex shapes, they can hardly distinguish between static and dynamic obstacles, leading to the limited performance of obstacle avoidance. While plenty of sophisticated learning-based dynamic obstacle detection algorithms exist in autonomous driving, the quadcopter's limited computation resources cannot achieve real-time performance using those approaches. To address these issues, we propose a real-time dynamic obstacle tracking and mapping system for quadcopter obstacle avoidance using an RGB-D camera. The proposed system first utilizes a depth image with an occupancy voxel map to generate potential dynamic obstacle regions as proposals. With the obstacle region proposals, the Kalman filter and our continuity filter are applied to track each dynamic obstacle. Finally, the environment-aware trajectory prediction method is proposed based on the Markov chain using the states of tracked dynamic obstacles. We implemented the proposed system with our custom quadcopter and navigation planner. The simulation and physical experiments show that our methods can successfully track and represent obstacles in dynamic environments in real-time and safely avoid obstacles.
Vision-aided UAV Navigation and Dynamic Obstacle Avoidance using Gradient-based B-spline Trajectory Optimization
Sep 15, 2022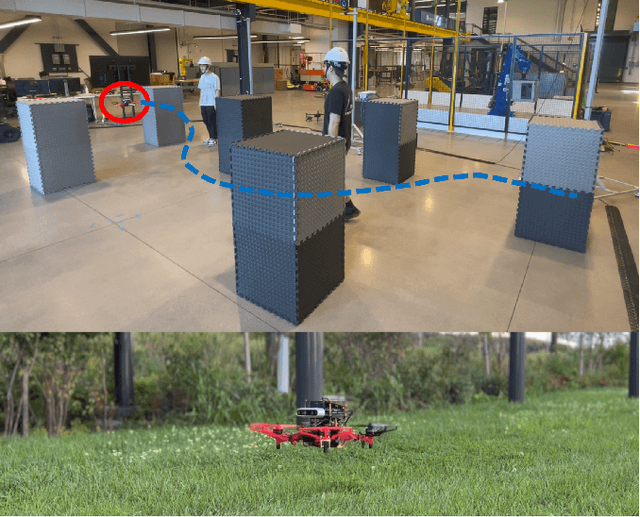


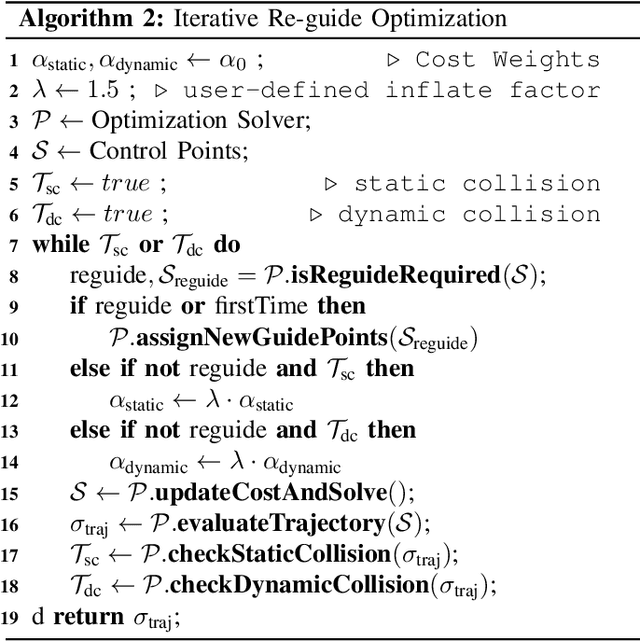
Navigating dynamic environments requires the robot to generate collision-free trajectories and actively avoid moving obstacles. Most previous works designed path planning algorithms based on one single map representation, such as the geometric, occupancy, or ESDF map. Although they have shown success in static environments, due to the limitation of map representation, those methods cannot reliably handle static and dynamic obstacles simultaneously. To address the problem, this paper proposes a gradient-based B-spline trajectory optimization algorithm utilizing the robot's onboard vision. The depth vision enables the robot to track and represent dynamic objects geometrically based on the voxel map. The proposed optimization first adopts the circle-based guide-point algorithm to approximate the costs and gradients for avoiding static obstacles. Then, with the vision-detected moving objects, our receding-horizon distance field is simultaneously used to prevent dynamic collisions. Finally, the iterative re-guide strategy is applied to generate the collision-free trajectory. The simulation and physical experiments prove that our method can run in real-time to navigate dynamic environments safely.