 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAgentic AI for Bilevel Long-Term Optimization of Policy-Driven Physical Layer Systems
Jun 23, 2026Network operators' changing policies, service requirements, and stringent real-time constraints render existing methods designed with fixed objectives and constraints ineffective. This paper presents Agentic long-term performance optimization (Agentic-LTPO), a nested bilevel optimization framework that can be applied to adaptive physical layer problem configuration. The key idea is to employ agentic AI to generate upper-level configurations in a bilevel optimization structure, where evolving operator policies, environment summaries, and historical experiences are translated into structured lower-level optimization problem configurations. The lower level solves the problems with updated configurations for real-time physical-layer decisions. Considering cell-free MIMO beamforming as a use case, we embody Agentic-LTPO by designing a new multi-agent decision process with retrieval-augmented experience-based verification in the upper level, together with a closed-form beamformer in the lower level. Experiments demonstrate that Agentic-LTPO exhibits strong adaptability to dynamic operator policies and effectively enhances the system's long-term performance by 57.2% compared to traditional methods.
OSNIP: Breaking the Privacy-Utility-Efficiency Trilemma in LLM Inference via Obfuscated Semantic Null Space
Jan 30, 2026We propose Obfuscated Semantic Null space Injection for Privacy (OSNIP), a lightweight client-side encryption framework for privacy-preserving LLM inference. Generalizing the geometric intuition of linear kernels to the high-dimensional latent space of LLMs, we formally define the ``Obfuscated Semantic Null Space'', a high-dimensional regime that preserves semantic fidelity while enforcing near-orthogonality to the original embedding. By injecting perturbations that project the original embedding into this space, OSNIP ensures privacy without any post-processing. Furthermore, OSNIP employs a key-dependent stochastic mapping that synthesizes individualized perturbation trajectories unique to each user. Evaluations on 12 generative and classification benchmarks show that OSNIP achieves state-of-the-art performance, sharply reducing attack success rates while maintaining strong model utility under strict security constraints.
Predicting Driver's Perceived Risk: a Model Based on Semi-Supervised Learning Strategy
Apr 17, 2025Drivers' perception of risk determines their acceptance, trust, and use of the Automated Driving Systems (ADSs). However, perceived risk is subjective and difficult to evaluate using existing methods. To address this issue, a driver's subjective perceived risk (DSPR) model is proposed, regarding perceived risk as a dynamically triggered mechanism with anisotropy and attenuation. 20 participants are recruited for a driver-in-the-loop experiment to report their real-time subjective risk ratings (SRRs) when experiencing various automatic driving scenarios. A convolutional neural network and bidirectional long short-term memory network with temporal pattern attention (CNN-Bi-LSTM-TPA) is embedded into a semi-supervised learning strategy to predict SRRs, aiming to reduce data noise caused by subjective randomness of participants. The results illustrate that DSPR achieves the highest prediction accuracy of 87.91% in predicting SRRs, compared to three state-of-the-art risk models. The semi-supervised strategy improves accuracy by 20.12%. Besides, CNN-Bi-LSTM-TPA network presents the highest accuracy among four different LSTM structures. This study offers an effective method for assessing driver's perceived risk, providing support for the safety enhancement of ADS and driver's trust improvement.
Optimal Beamforming Design for MIMO DFRC Systems with Transmit Covariance Constraint
Mar 06, 2023This paper develops optimal beamforming design in a downlink multi-input-multi-output (MIMO) dual-function radar-communication (DFRC) system to maximize the weighted sum-rate of communicating users under the prescribed transmit covariance constraint for radar performance guarantee. In single-user case, we show that the transmit covariance constraint implies inherent orthogonality among beamforming vectors in use. Then leveraging a corollary of Cauchy's interlace theorem, we derive the globally optimal beamforming solution in closed form. For multi-user case, we exploit the connection between weighted sum-rate and weighted minimum-mean-squared-error (MMSE) to reformulate the problem, and develop a block-coordinate-descent (BCD) type algorithm with closed-form solution derived for the subproblem in each step and fast convergence to a locally optimal beamforming design. Numerical results validate the effectiveness of our proposed schemes.
A real-time dynamic obstacle tracking and mapping system for UAV navigation and collision avoidance with an RGB-D camera
Sep 17, 2022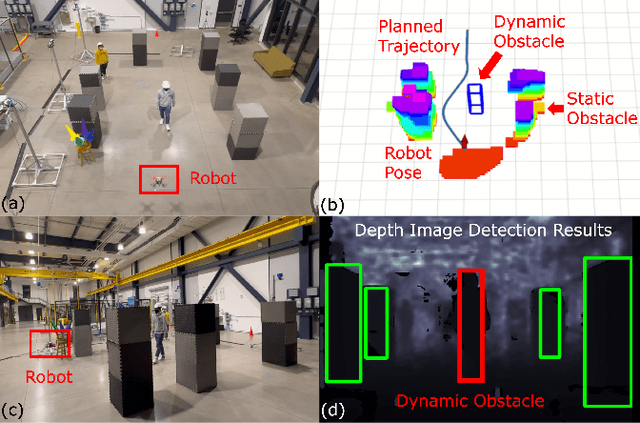
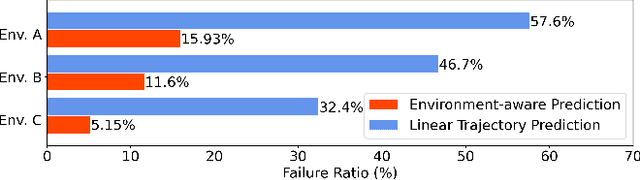
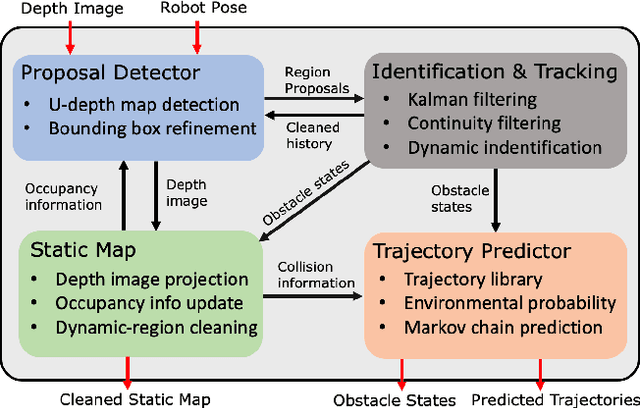
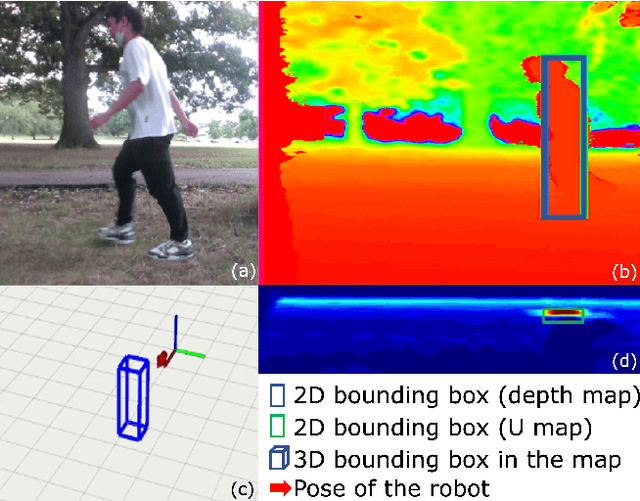
The real-time dynamic environment perception has become vital for autonomous robots in crowded spaces. Although the popular voxel-based mapping methods can efficiently represent 3D obstacles with arbitrarily complex shapes, they can hardly distinguish between static and dynamic obstacles, leading to the limited performance of obstacle avoidance. While plenty of sophisticated learning-based dynamic obstacle detection algorithms exist in autonomous driving, the quadcopter's limited computation resources cannot achieve real-time performance using those approaches. To address these issues, we propose a real-time dynamic obstacle tracking and mapping system for quadcopter obstacle avoidance using an RGB-D camera. The proposed system first utilizes a depth image with an occupancy voxel map to generate potential dynamic obstacle regions as proposals. With the obstacle region proposals, the Kalman filter and our continuity filter are applied to track each dynamic obstacle. Finally, the environment-aware trajectory prediction method is proposed based on the Markov chain using the states of tracked dynamic obstacles. We implemented the proposed system with our custom quadcopter and navigation planner. The simulation and physical experiments show that our methods can successfully track and represent obstacles in dynamic environments in real-time and safely avoid obstacles.
Accurate position tracking with a single UWB anchor
May 21, 2020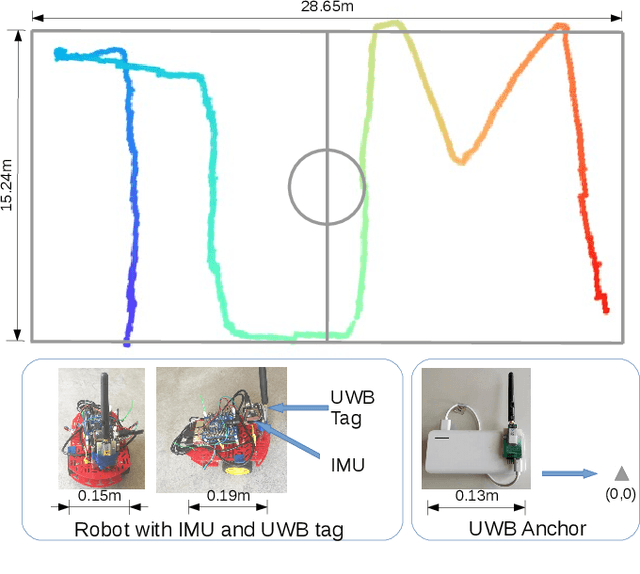
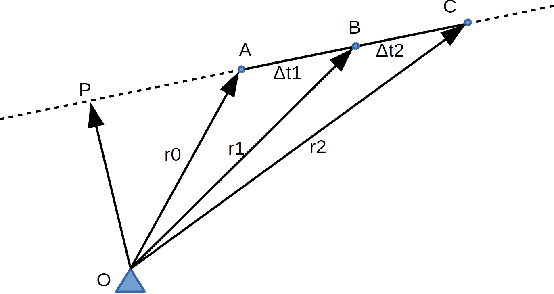
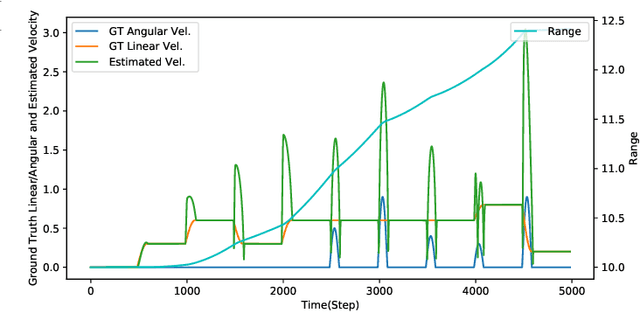
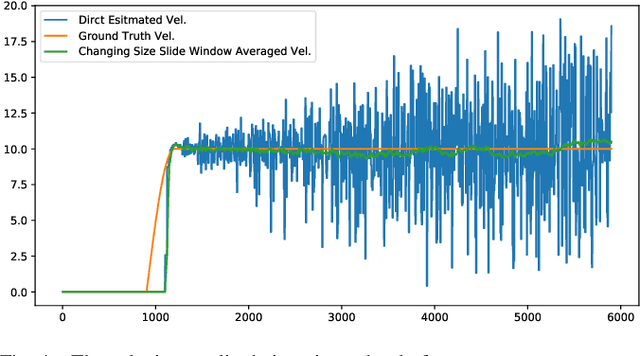
Accurate localization and tracking are a fundamental requirement for robotic applications. Localization systems like GPS, optical tracking, simultaneous localization and mapping (SLAM) are used for daily life activities, research, and commercial applications. Ultra-wideband (UWB) technology provides another venue to accurately locate devices both indoors and outdoors. In this paper, we study a localization solution with a single UWB anchor, instead of the traditional multi-anchor setup. Besides the challenge of a single UWB ranging source, the only other sensor we require is a low-cost 9 DoF inertial measurement unit (IMU). Under such a configuration, we propose continuous monitoring of UWB range changes to estimate the robot speed when moving on a line. Combining speed estimation with orientation estimation from the IMU sensor, the system becomes temporally observable. We use an Extended Kalman Filter (EKF) to estimate the pose of a robot. With our solution, we can effectively correct the accumulated error and maintain accurate tracking of a moving robot.