 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRelayGR: Scaling Long-Sequence Generative Recommendation via Cross-Stage Relay-Race Inference
Jan 05, 2026Real-time recommender systems execute multi-stage cascades (retrieval, pre-processing, fine-grained ranking) under strict tail-latency SLOs, leaving only tens of milliseconds for ranking. Generative recommendation (GR) models can improve quality by consuming long user-behavior sequences, but in production their online sequence length is tightly capped by the ranking-stage P99 budget. We observe that the majority of GR tokens encode user behaviors that are independent of the item candidates, suggesting an opportunity to pre-infer a user-behavior prefix once and reuse it during ranking rather than recomputing it on the critical path. Realizing this idea at industrial scale is non-trivial: the prefix cache must survive across multiple pipeline stages before the final ranking instance is determined, the user population implies cache footprints far beyond a single device, and indiscriminate pre-inference would overload shared resources under high QPS. We present RelayGR, a production system that enables in-HBM relay-race inference for GR. RelayGR selectively pre-infers long-term user prefixes, keeps their KV caches resident in HBM over the request lifecycle, and ensures the subsequent ranking can consume them without remote fetches. RelayGR combines three techniques: 1) a sequence-aware trigger that admits only at-risk requests under a bounded cache footprint and pre-inference load, 2) an affinity-aware router that co-locates cache production and consumption by routing both the auxiliary pre-infer signal and the ranking request to the same instance, and 3) a memory-aware expander that uses server-local DRAM to capture short-term cross-request reuse while avoiding redundant reloads. We implement RelayGR on Huawei Ascend NPUs and evaluate it with real queries. Under a fixed P99 SLO, RelayGR supports up to 1.5$\times$ longer sequences and improves SLO-compliant throughput by up to 3.6$\times$.
Adaptive Planning Framework for UAV-Based Surface Inspection in Partially Unknown Indoor Environments
Apr 12, 2025



Inspecting indoor environments such as tunnels, industrial facilities, and construction sites is essential for infrastructure monitoring and maintenance. While manual inspection in these environments is often time-consuming and potentially hazardous, Unmanned Aerial Vehicles (UAVs) can improve efficiency by autonomously handling inspection tasks. Such inspection tasks usually rely on reference maps for coverage planning. However, in industrial applications, only the floor plans are typically available. The unforeseen obstacles not included in the floor plans will result in outdated reference maps and inefficient or unsafe inspection trajectories. In this work, we propose an adaptive inspection framework that integrates global coverage planning with local reactive adaptation to improve the coverage and efficiency of UAV-based inspection in partially unknown indoor environments. Experimental results in structured indoor scenarios demonstrate the effectiveness of the proposed approach in inspection efficiency and achieving high coverage rates with adaptive obstacle handling, highlighting its potential for enhancing the efficiency of indoor facility inspection.
LV-DOT: LiDAR-visual dynamic obstacle detection and tracking for autonomous robot navigation
Feb 28, 2025


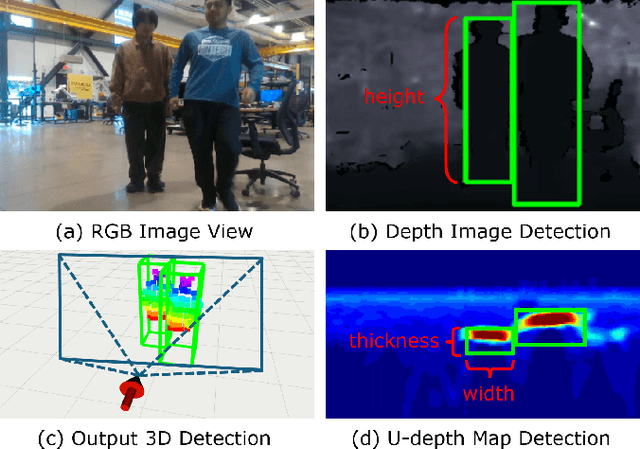
Accurate perception of dynamic obstacles is essential for autonomous robot navigation in indoor environments. Although sophisticated 3D object detection and tracking methods have been investigated and developed thoroughly in the fields of computer vision and autonomous driving, their demands on expensive and high-accuracy sensor setups and substantial computational resources from large neural networks make them unsuitable for indoor robotics. Recently, more lightweight perception algorithms leveraging onboard cameras or LiDAR sensors have emerged as promising alternatives. However, relying on a single sensor poses significant limitations: cameras have limited fields of view and can suffer from high noise, whereas LiDAR sensors operate at lower frequencies and lack the richness of visual features. To address this limitation, we propose a dynamic obstacle detection and tracking framework that uses both onboard camera and LiDAR data to enable lightweight and accurate perception. Our proposed method expands on our previous ensemble detection approach, which integrates outputs from multiple low-accuracy but computationally efficient detectors to ensure real-time performance on the onboard computer. In this work, we propose a more robust fusion strategy that integrates both LiDAR and visual data to enhance detection accuracy further. We then utilize a tracking module that adopts feature-based object association and the Kalman filter to track and estimate detected obstacles' states. Besides, a dynamic obstacle classification algorithm is designed to robustly identify moving objects. The dataset evaluation demonstrates a better perception performance compared to benchmark methods. The physical experiments on a quadcopter robot confirms the feasibility for real-world navigation.