 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeElectronic Health Records-Based Data-Driven Diabetes Knowledge Unveiling and Risk Prognosis
Dec 05, 2024


In the healthcare sector, the application of deep learning technologies has revolutionized data analysis and disease forecasting. This is particularly evident in the field of diabetes, where the deep analysis of Electronic Health Records (EHR) has unlocked new opportunities for early detection and effective intervention strategies. Our research presents an innovative model that synergizes the capabilities of Bidirectional Long Short-Term Memory Networks-Conditional Random Field (BiLSTM-CRF) with a fusion of XGBoost and Logistic Regression. This model is designed to enhance the accuracy of diabetes risk prediction by conducting an in-depth analysis of electronic medical records data. The first phase of our approach involves employing BiLSTM-CRF to delve into the temporal characteristics and latent patterns present in EHR data. This method effectively uncovers the progression trends of diabetes, which are often hidden in the complex data structures of medical records. The second phase leverages the combined strength of XGBoost and Logistic Regression to classify these extracted features and evaluate associated risks. This dual approach facilitates a more nuanced and precise prediction of diabetes, outperforming traditional models, particularly in handling multifaceted and nonlinear medical datasets. Our research demonstrates a notable advancement in diabetes prediction over traditional methods, showcasing the effectiveness of our combined BiLSTM-CRF, XGBoost, and Logistic Regression model. This study highlights the value of data-driven strategies in clinical decision-making, equipping healthcare professionals with precise tools for early detection and intervention. By enabling personalized treatment and timely care, our approach signifies progress in incorporating advanced analytics in healthcare, potentially improving outcomes for diabetes and other chronic conditions.
Optimized CNNs for Rapid 3D Point Cloud Object Recognition
Dec 03, 2024
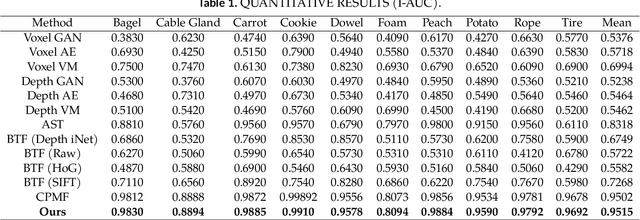

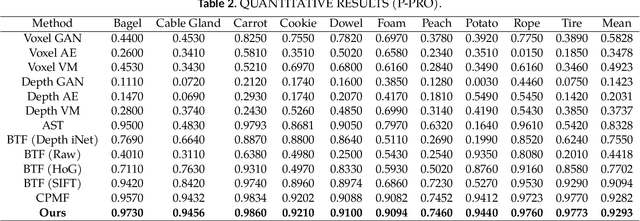
This study introduces a method for efficiently detecting objects within 3D point clouds using convolutional neural networks (CNNs). Our approach adopts a unique feature-centric voting mechanism to construct convolutional layers that capitalize on the typical sparsity observed in input data. We explore the trade-off between accuracy and speed across diverse network architectures and advocate for integrating an $\mathcal{L}_1$ penalty on filter activations to augment sparsity within intermediate layers. This research pioneers the proposal of sparse convolutional layers combined with $\mathcal{L}_1$ regularization to effectively handle large-scale 3D data processing. Our method's efficacy is demonstrated on the MVTec 3D-AD object detection benchmark. The Vote3Deep models, with just three layers, outperform the previous state-of-the-art in both laser-only approaches and combined laser-vision methods. Additionally, they maintain competitive processing speeds. This underscores our approach's capability to substantially enhance detection performance while ensuring computational efficiency suitable for real-time applications.
The Design of Autonomous UAV Prototypes for Inspecting Tunnel Construction Environment
Aug 14, 2024This article presents novel designs of autonomous UAV prototypes specifically developed for inspecting GPS-denied tunnel construction environments with dynamic human and robotic presence. Our UAVs integrate advanced sensor suites and robust motion planning algorithms to autonomously navigate and explore these complex environments. We validated our approach through comprehensive simulation experiments in PX4 Gazebo and Airsim Unreal Engine 4 environments. Real-world wind tests and exploration experiments demonstrate the UAVs' capability to operate stably under diverse environmental conditions without GPS assistance. This study highlights the practicality and resilience of our UAV prototypes in real-world applications.
DPMPC-Planner: A real-time UAV trajectory planning framework for complex static environments with dynamic obstacles
Sep 14, 2021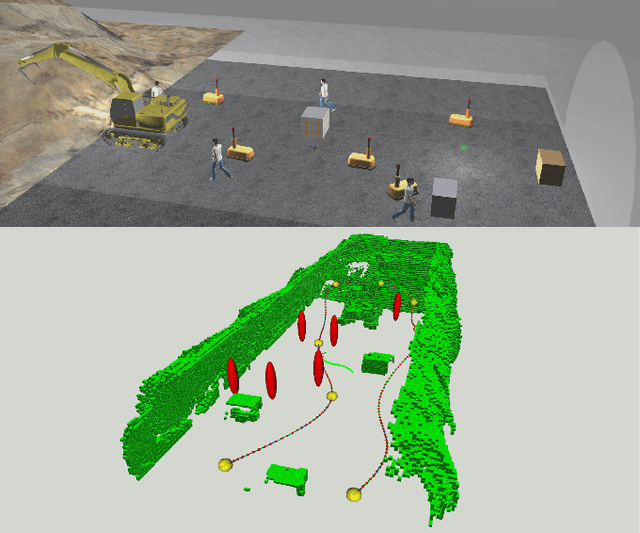


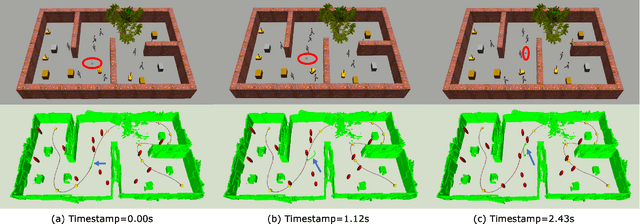
Safe UAV navigation is challenging due to the complex environment structures, dynamic obstacles, and uncertainties from measurement noises and unpredictable moving obstacle behaviors. Although plenty of recent works achieve safe navigation in complex static environments with sophisticated mapping algorithms, such as occupancy map and ESDF map, these methods cannot reliably handle dynamic environments due to the mapping limitation from moving obstacles. To address the limitation, this paper proposes a trajectory planning framework to achieve safe navigation considering complex static environments with dynamic obstacles. To reliably handle dynamic obstacles, we divide the environment representation into static mapping and dynamic object representation, which can be obtained from computer vision methods. Our framework first generates a static trajectory based on the proposed iterative corridor shrinking algorithm. Then, reactive chance-constrained model predictive control with temporal goal tracking is applied to avoid dynamic obstacles with uncertainties. The simulation results in various environments demonstrate the ability of our algorithm to navigate safely in complex static environments with dynamic obstacles.