 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOnboard dynamic-object detection and tracking for autonomous robot navigation with RGB-D camera
Paper and Code
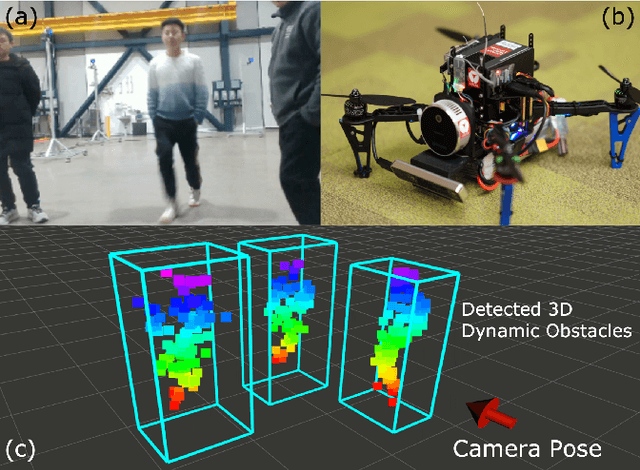
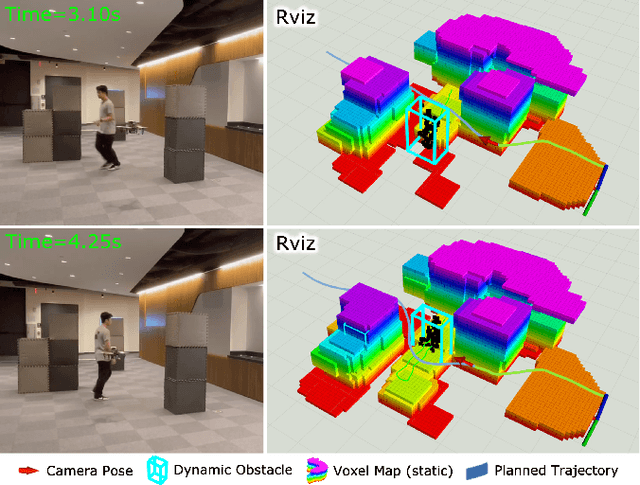
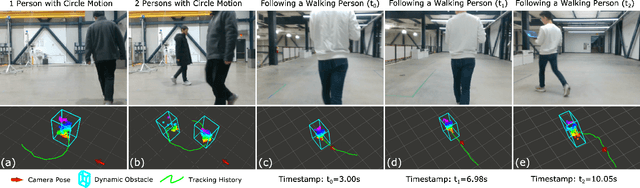
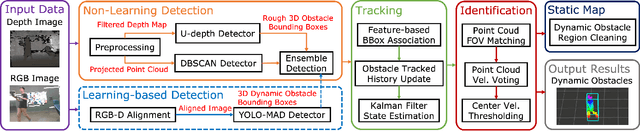
Deploying autonomous robots in crowded indoor environments usually requires them to have accurate dynamic obstacle perception. Although plenty of previous works in the autonomous driving field have investigated the 3D object detection problem, the usage of dense point clouds from a heavy LiDAR and their high computation cost for learning-based data processing make those methods not applicable to lightweight robots, such as vision-based UAVs with small onboard computers. To address this issue, we propose a lightweight 3D dynamic obstacle detection and tracking (DODT) method based on an RGB-D camera. Our method adopts a novel ensemble detection strategy, combining multiple computationally efficient but low-accuracy detectors to achieve real-time high-accuracy obstacle detection. Besides, we introduce a new feature-based data association method to prevent mismatches and use the Kalman filter with the constant acceleration model to track detected obstacles. In addition, our system includes an optional and auxiliary learning-based module to enhance the obstacle detection range and dynamic obstacle identification. The users can determine whether or not to run this module based on the available computation resources. The proposed method is implemented in a lightweight quadcopter, and the experiments prove that the algorithm can make the robot detect dynamic obstacles and navigate dynamic environments safely.