 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHeuristic-based Incremental Probabilistic Roadmap for Efficient UAV Exploration in Dynamic Environments
Paper and Code
Sep 17, 2023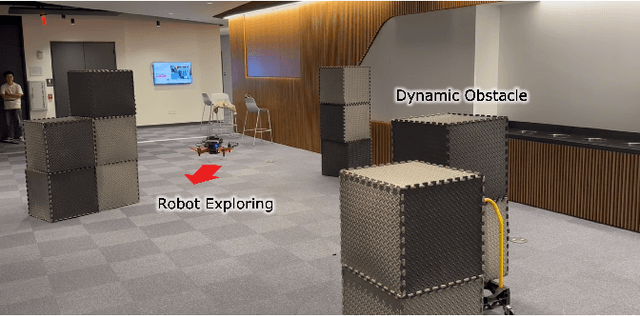
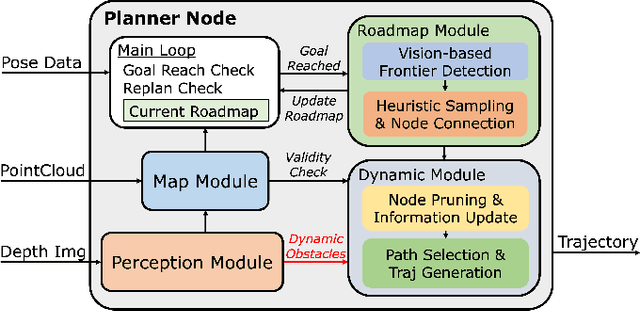
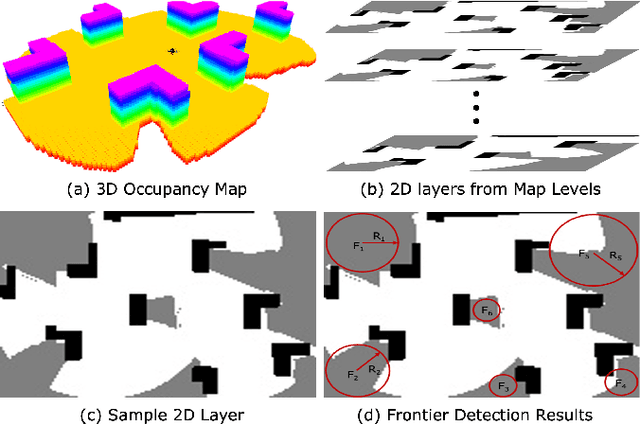
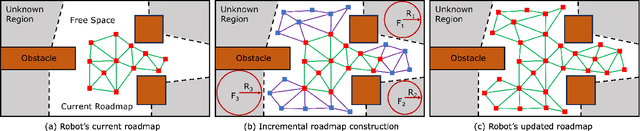
Autonomous exploration in dynamic environments necessitates a planner that can proactively respond to changes and make efficient and safe decisions for robots. Although plenty of sampling-based works have shown success in exploring static environments, their inherent sampling randomness and limited utilization of previous samples often result in sub-optimal exploration efficiency. Additionally, most of these methods struggle with efficient replanning and collision avoidance in dynamic settings. To overcome these limitations, we propose the Heuristic-based Incremental Probabilistic Roadmap Exploration (HIRE) planner for UAVs exploring dynamic environments. The proposed planner adopts an incremental sampling strategy based on the probabilistic roadmap constructed by heuristic sampling toward the unexplored region next to the free space, defined as the heuristic frontier regions. The heuristic frontier regions are detected by applying a lightweight vision-based method to the different levels of the occupancy map. Moreover, our dynamic module ensures that the planner dynamically updates roadmap information based on the environment changes and avoids dynamic obstacles. Simulation and physical experiments prove that our planner can efficiently and safely explore dynamic environments.