 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHuman 3D Avatar Modeling with Implicit Neural Representation: A Brief Survey
Jun 06, 2023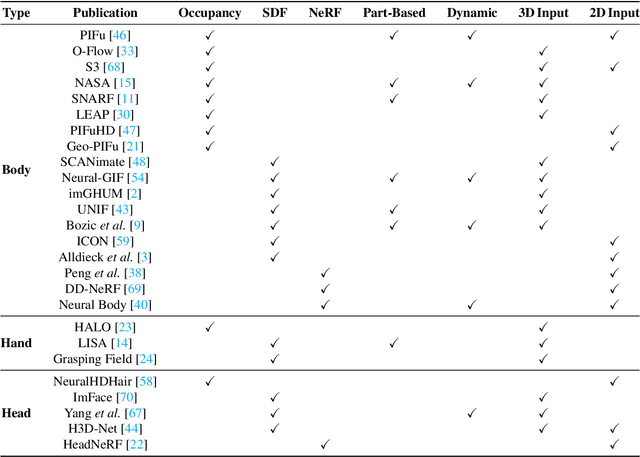
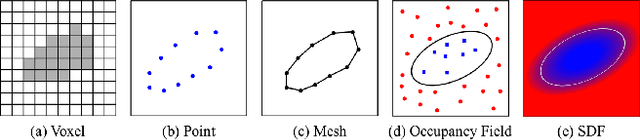
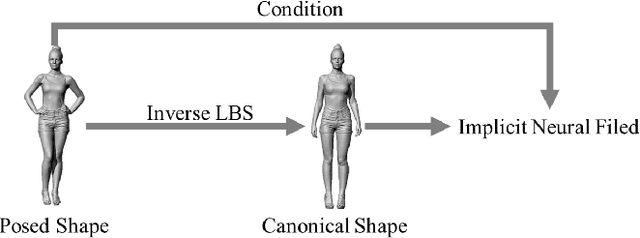
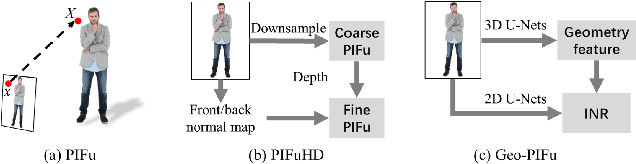
A human 3D avatar is one of the important elements in the metaverse, and the modeling effect directly affects people's visual experience. However, the human body has a complex topology and diverse details, so it is often expensive, time-consuming, and laborious to build a satisfactory model. Recent studies have proposed a novel method, implicit neural representation, which is a continuous representation method and can describe objects with arbitrary topology at arbitrary resolution. Researchers have applied implicit neural representation to human 3D avatar modeling and obtained more excellent results than traditional methods. This paper comprehensively reviews the application of implicit neural representation in human body modeling. First, we introduce three implicit representations of occupancy field, SDF, and NeRF, and make a classification of the literature investigated in this paper. Then the application of implicit modeling methods in the body, hand, and head are compared and analyzed respectively. Finally, we point out the shortcomings of current work and provide available suggestions for researchers.
From perception to control: an autonomous driving system for a formula student driverless car
Aug 31, 2019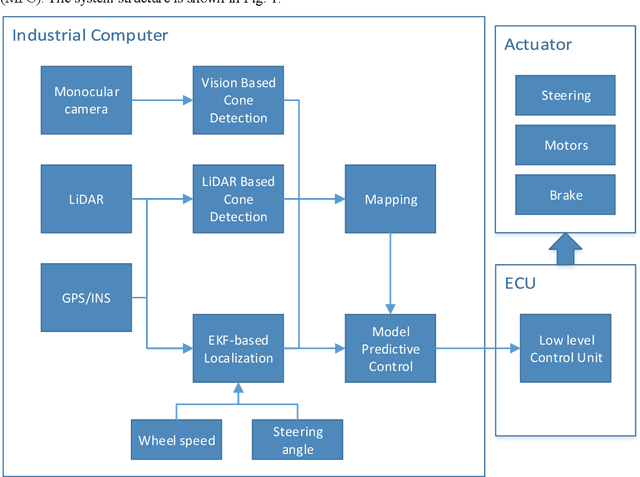

This paper introduces the autonomous system of the "Smart Shark II" which won the Formula Student Autonomous China (FSAC) Competition in 2018. In this competition, an autonomous racecar is required to complete autonomously two laps of unknown track. In this paper, the author presents the self-driving software structure of this racecar which ensure high vehicle speed and safety. The key components ensure a stable driving of the racecar, LiDAR-based and Vision-based cone detection provide a redundant perception; the EKF-based localization offers high accuracy and high frequency state estimation; perception results are accumulated in time and space by occupancy grid map. After getting the trajectory, a model predictive control algorithm is used to optimize in both longitudinal and lateral control of the racecar. Finally, the performance of an experiment based on real-world data is shown.