 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSparse3DPR: Training-Free 3D Hierarchical Scene Parsing and Task-Adaptive Subgraph Reasoning from Sparse RGB Views
Nov 11, 2025Recently, large language models (LLMs) have been explored widely for 3D scene understanding. Among them, training-free approaches are gaining attention for their flexibility and generalization over training-based methods. However, they typically struggle with accuracy and efficiency in practical deployment. To address the problems, we propose Sparse3DPR, a novel training-free framework for open-ended scene understanding, which leverages the reasoning capabilities of pre-trained LLMs and requires only sparse-view RGB inputs. Specifically, we introduce a hierarchical plane-enhanced scene graph that supports open vocabulary and adopts dominant planar structures as spatial anchors, which enables clearer reasoning chains and more reliable high-level inferences. Furthermore, we design a task-adaptive subgraph extraction method to filter query-irrelevant information dynamically, reducing contextual noise and improving 3D scene reasoning efficiency and accuracy. Experimental results demonstrate the superiority of Sparse3DPR, which achieves a 28.7% EM@1 improvement and a 78.2% speedup compared with ConceptGraphs on the Space3D-Bench. Moreover, Sparse3DPR obtains comparable performance to training-based methods on ScanQA, with additional real-world experiments confirming its robustness and generalization capability.
DOGE: An Extrinsic Orientation and Gyroscope Bias Estimation for Visual-Inertial Odometry Initialization
Dec 11, 2024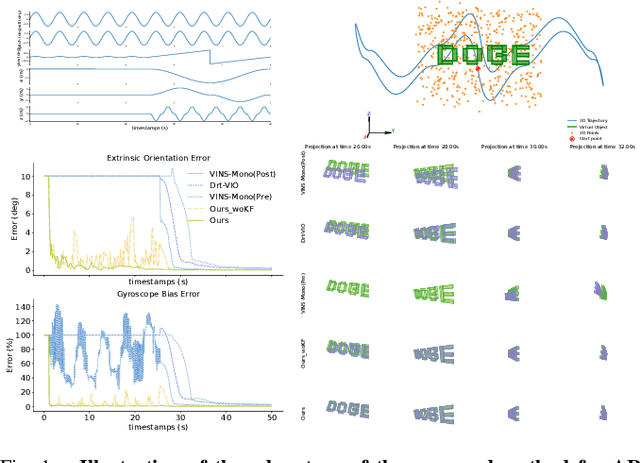
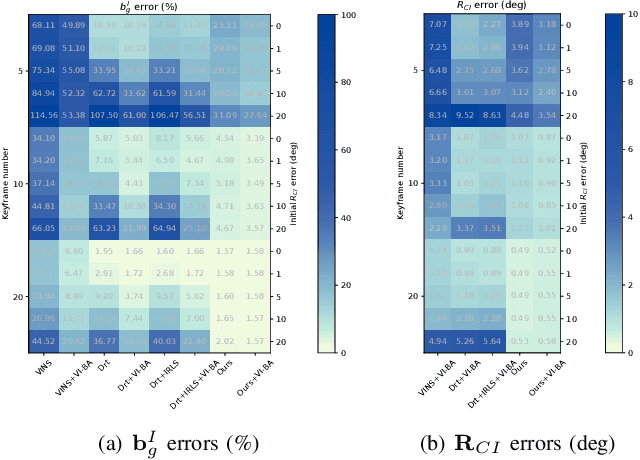
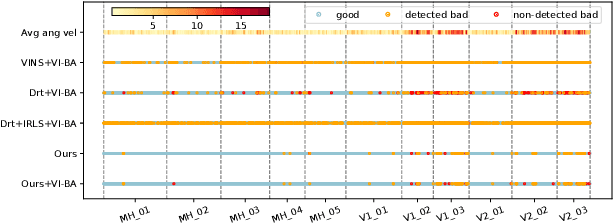
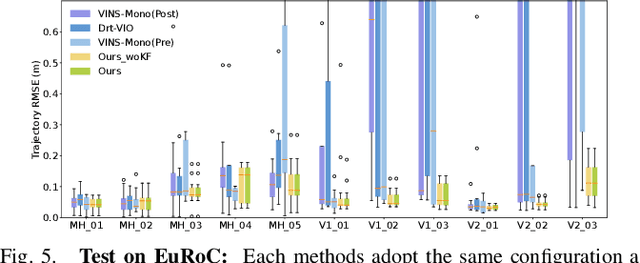
Most existing visual-inertial odometry (VIO) initialization methods rely on accurate pre-calibrated extrinsic parameters. However, during long-term use, irreversible structural deformation caused by temperature changes, mechanical squeezing, etc. will cause changes in extrinsic parameters, especially in the rotational part. Existing initialization methods that simultaneously estimate extrinsic parameters suffer from poor robustness, low precision, and long initialization latency due to the need for sufficient translational motion. To address these problems, we propose a novel VIO initialization method, which jointly considers extrinsic orientation and gyroscope bias within the normal epipolar constraints, achieving higher precision and better robustness without delayed rotational calibration. First, a rotation-only constraint is designed for extrinsic orientation and gyroscope bias estimation, which tightly couples gyroscope measurements and visual observations and can be solved in pure-rotation cases. Second, we propose a weighting strategy together with a failure detection strategy to enhance the precision and robustness of the estimator. Finally, we leverage Maximum A Posteriori to refine the results before enough translation parallax comes. Extensive experiments have demonstrated that our method outperforms the state-of-the-art methods in both accuracy and robustness while maintaining competitive efficiency.
PGD-VIO: An Accurate Plane-Aided Visual-Inertial Odometry with Graph-Based Drift Suppression
Jul 25, 2024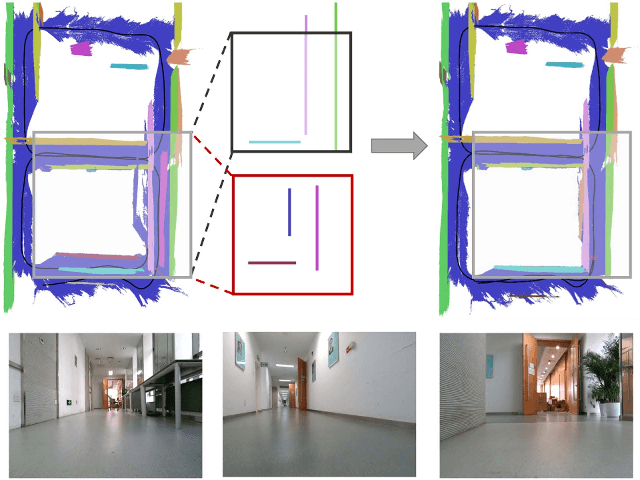
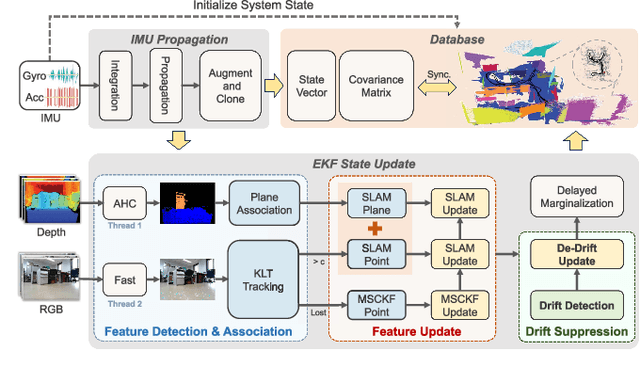
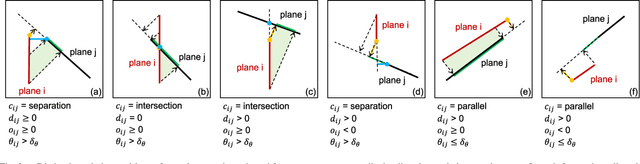
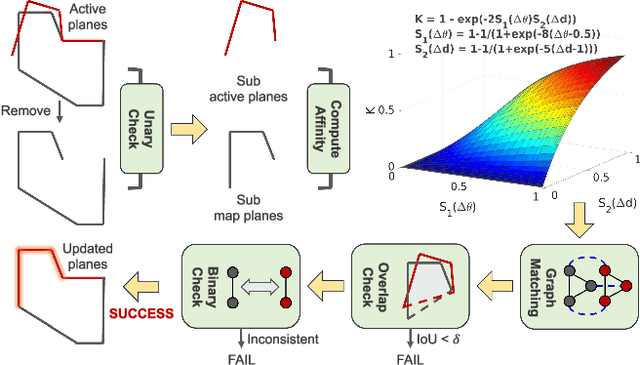
Generally, high-level features provide more geometrical information compared to point features, which can be exploited to further constrain motions. Planes are commonplace in man-made environments, offering an active means to reduce drift, due to their extensive spatial and temporal observability. To make full use of planar information, we propose a novel visual-inertial odometry (VIO) using an RGBD camera and an inertial measurement unit (IMU), effectively integrating point and plane features in an extended Kalman filter (EKF) framework. Depth information of point features is leveraged to improve the accuracy of point triangulation, while plane features serve as direct observations added into the state vector. Notably, to benefit long-term navigation,a novel graph-based drift detection strategy is proposed to search overlapping and identical structures in the plane map so that the cumulative drift is suppressed subsequently. The experimental results on two public datasets demonstrate that our system outperforms state-of-the-art methods in localization accuracy and meanwhile generates a compact and consistent plane map, free of expensive global bundle adjustment and loop closing techniques.
An Accurate and Real-time Relative Pose Estimation from Triple Point-line Images by Decoupling Rotation and Translation
Mar 18, 2024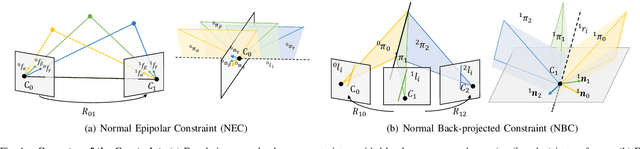
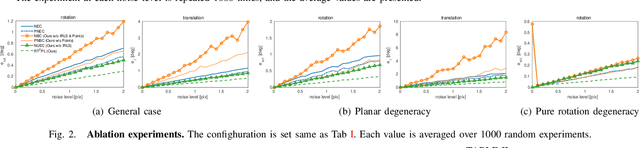
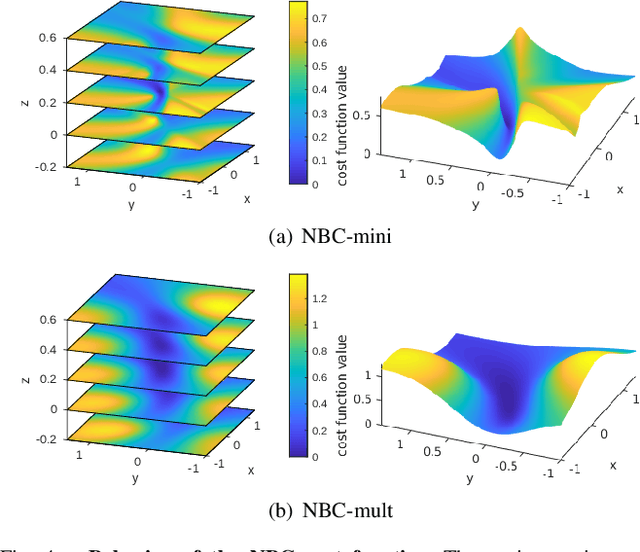
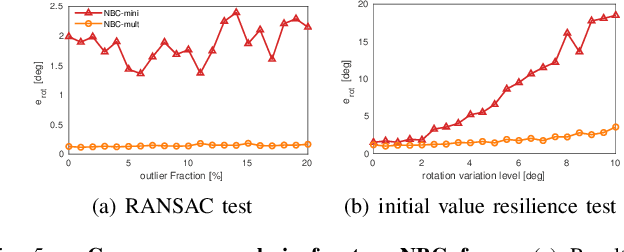
Line features are valid complements for point features in man-made environments. 3D-2D constraints provided by line features have been widely used in Visual Odometry (VO) and Structure-from-Motion (SfM) systems. However, how to accurately solve three-view relative motion only with 2D observations of points and lines in real time has not been fully explored. In this paper, we propose a novel three-view pose solver based on rotation-translation decoupled estimation. First, a high-precision rotation estimation method based on normal vector coplanarity constraints that consider the uncertainty of observations is proposed, which can be solved by Levenberg-Marquardt (LM) algorithm efficiently. Second, a robust linear translation constraint that minimizes the degree of the rotation components and feature observation components in equations is elaborately designed for estimating translations accurately. Experiments on synthetic data and real-world data show that the proposed approach improves both rotation and translation accuracy compared to the classical trifocal-tensor-based method and the state-of-the-art two-view algorithm in outdoor and indoor environments.
From perception to control: an autonomous driving system for a formula student driverless car
Aug 31, 2019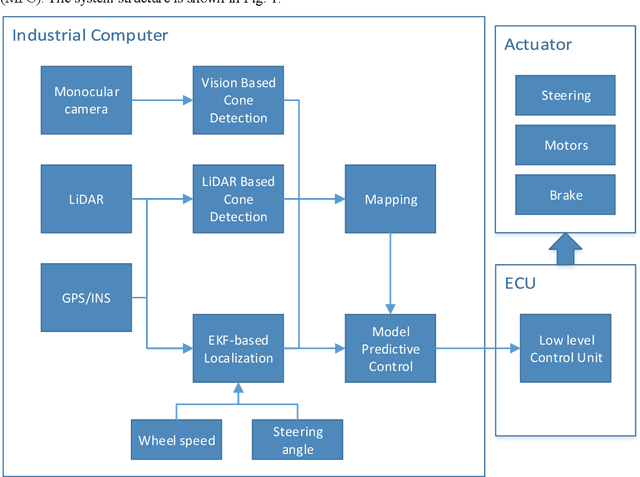

This paper introduces the autonomous system of the "Smart Shark II" which won the Formula Student Autonomous China (FSAC) Competition in 2018. In this competition, an autonomous racecar is required to complete autonomously two laps of unknown track. In this paper, the author presents the self-driving software structure of this racecar which ensure high vehicle speed and safety. The key components ensure a stable driving of the racecar, LiDAR-based and Vision-based cone detection provide a redundant perception; the EKF-based localization offers high accuracy and high frequency state estimation; perception results are accumulated in time and space by occupancy grid map. After getting the trajectory, a model predictive control algorithm is used to optimize in both longitudinal and lateral control of the racecar. Finally, the performance of an experiment based on real-world data is shown.