 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn Accurate and Real-time Relative Pose Estimation from Triple Point-line Images by Decoupling Rotation and Translation
Mar 18, 2024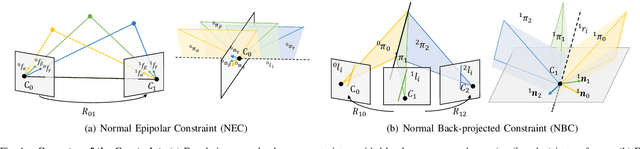
Line features are valid complements for point features in man-made environments. 3D-2D constraints provided by line features have been widely used in Visual Odometry (VO) and Structure-from-Motion (SfM) systems. However, how to accurately solve three-view relative motion only with 2D observations of points and lines in real time has not been fully explored. In this paper, we propose a novel three-view pose solver based on rotation-translation decoupled estimation. First, a high-precision rotation estimation method based on normal vector coplanarity constraints that consider the uncertainty of observations is proposed, which can be solved by Levenberg-Marquardt (LM) algorithm efficiently. Second, a robust linear translation constraint that minimizes the degree of the rotation components and feature observation components in equations is elaborately designed for estimating translations accurately. Experiments on synthetic data and real-world data show that the proposed approach improves both rotation and translation accuracy compared to the classical trifocal-tensor-based method and the state-of-the-art two-view algorithm in outdoor and indoor environments.