 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFlashLabs Chroma 1.0: A Real-Time End-to-End Spoken Dialogue Model with Personalized Voice Cloning
Jan 16, 2026Recent end-to-end spoken dialogue systems leverage speech tokenizers and neural audio codecs to enable LLMs to operate directly on discrete speech representations. However, these models often exhibit limited speaker identity preservation, hindering personalized voice interaction. In this work, we present Chroma 1.0, the first open-source, real-time, end-to-end spoken dialogue model that achieves both low-latency interaction and high-fidelity personalized voice cloning. Chroma achieves sub-second end-to-end latency through an interleaved text-audio token schedule (1:2) that supports streaming generation, while maintaining high-quality personalized voice synthesis across multi-turn conversations. Our experimental results demonstrate that Chroma achieves a 10.96% relative improvement in speaker similarity over the human baseline, with a Real-Time Factor (RTF) of 0.43, while maintaining strong reasoning and dialogue capabilities. Our code and models are publicly available at https://github.com/FlashLabs-AI-Corp/FlashLabs-Chroma and https://huggingface.co/FlashLabs/Chroma-4B .
Prompt-Guided Environmentally Consistent Adversarial Patch
Nov 15, 2024



Adversarial attacks in the physical world pose a significant threat to the security of vision-based systems, such as facial recognition and autonomous driving. Existing adversarial patch methods primarily focus on improving attack performance, but they often produce patches that are easily detectable by humans and struggle to achieve environmental consistency, i.e., blending patches into the environment. This paper introduces a novel approach for generating adversarial patches, which addresses both the visual naturalness and environmental consistency of the patches. We propose Prompt-Guided Environmentally Consistent Adversarial Patch (PG-ECAP), a method that aligns the patch with the environment to ensure seamless integration into the environment. The approach leverages diffusion models to generate patches that are both environmental consistency and effective in evading detection. To further enhance the naturalness and consistency, we introduce two alignment losses: Prompt Alignment Loss and Latent Space Alignment Loss, ensuring that the generated patch maintains its adversarial properties while fitting naturally within its environment. Extensive experiments in both digital and physical domains demonstrate that PG-ECAP outperforms existing methods in attack success rate and environmental consistency.
From perception to control: an autonomous driving system for a formula student driverless car
Aug 31, 2019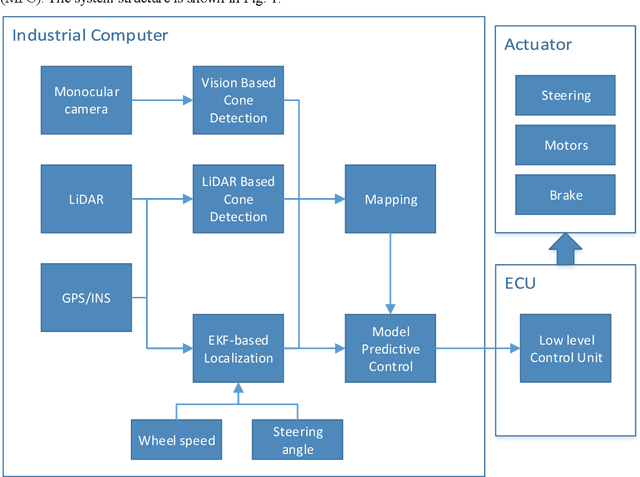

This paper introduces the autonomous system of the "Smart Shark II" which won the Formula Student Autonomous China (FSAC) Competition in 2018. In this competition, an autonomous racecar is required to complete autonomously two laps of unknown track. In this paper, the author presents the self-driving software structure of this racecar which ensure high vehicle speed and safety. The key components ensure a stable driving of the racecar, LiDAR-based and Vision-based cone detection provide a redundant perception; the EKF-based localization offers high accuracy and high frequency state estimation; perception results are accumulated in time and space by occupancy grid map. After getting the trajectory, a model predictive control algorithm is used to optimize in both longitudinal and lateral control of the racecar. Finally, the performance of an experiment based on real-world data is shown.