 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePGD-VIO: An Accurate Plane-Aided Visual-Inertial Odometry with Graph-Based Drift Suppression
Jul 25, 2024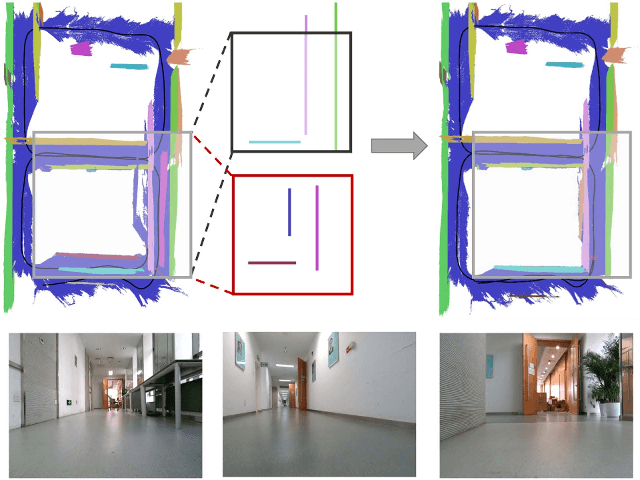
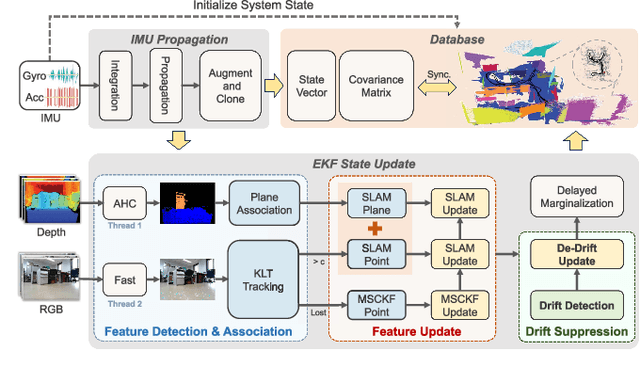
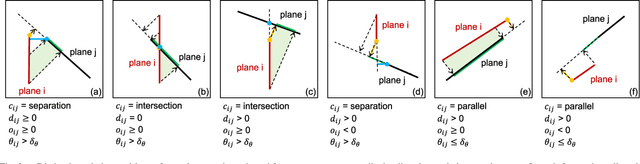
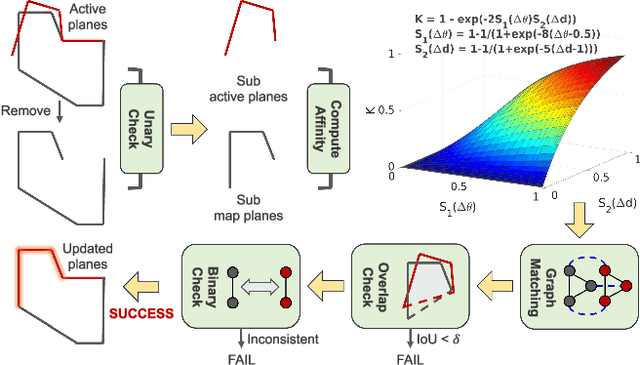
Generally, high-level features provide more geometrical information compared to point features, which can be exploited to further constrain motions. Planes are commonplace in man-made environments, offering an active means to reduce drift, due to their extensive spatial and temporal observability. To make full use of planar information, we propose a novel visual-inertial odometry (VIO) using an RGBD camera and an inertial measurement unit (IMU), effectively integrating point and plane features in an extended Kalman filter (EKF) framework. Depth information of point features is leveraged to improve the accuracy of point triangulation, while plane features serve as direct observations added into the state vector. Notably, to benefit long-term navigation,a novel graph-based drift detection strategy is proposed to search overlapping and identical structures in the plane map so that the cumulative drift is suppressed subsequently. The experimental results on two public datasets demonstrate that our system outperforms state-of-the-art methods in localization accuracy and meanwhile generates a compact and consistent plane map, free of expensive global bundle adjustment and loop closing techniques.
Performance Analysis of Hybrid RF-Reconfigurable Intelligent Surfaces Assisted FSO Communication
Jan 21, 2022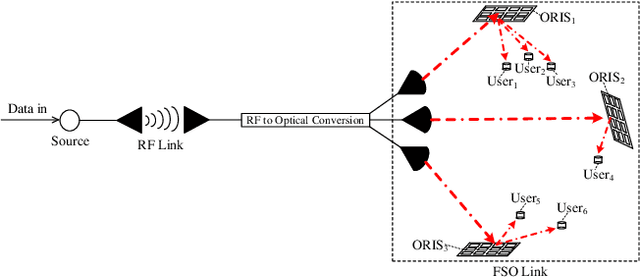
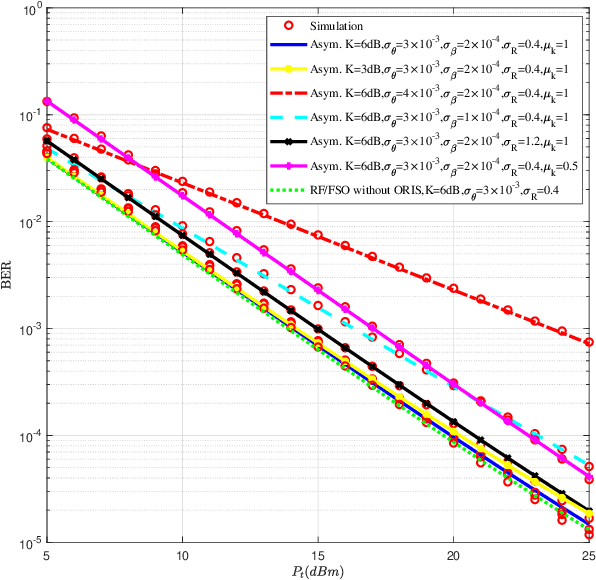
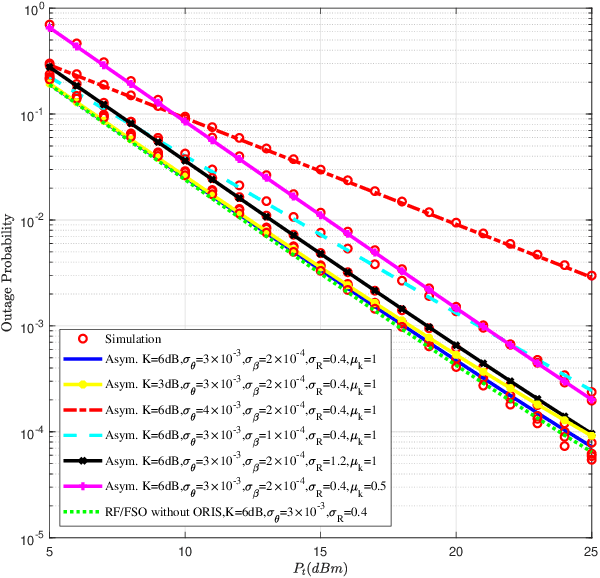
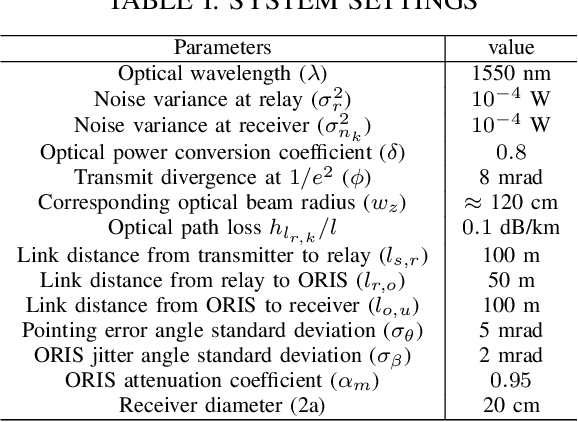
Optical reconfigurable intelligent surface (ORIS) is an emerging technology that can achieve reconfigurable optical propagation environments by precisely adjusting signal's reflection and shape through a large number of passive reflecting elements. In this paper, we investigate the performance of an ORIS-assisted dual-hop hybrid radio frequency (RF) and free space optics (FSO) communication system. By jointly considering the physical models of ORIS, RF channel, atmospheric turbulence, and pointing error, the closed-form solutions of the system's precise outage probability, asymptotic outage probability and BER have been derived. It is shown through numerical results that the derivation results are accurate and the RF-FSO links with ORISs show a slightly worse performance than the traditional RF-FSO links. Based on theoretical analysis and simulation results, the system design and effect of each parameter have been discussed.
FaceScape: 3D Facial Dataset and Benchmark for Single-View 3D Face Reconstruction
Nov 01, 2021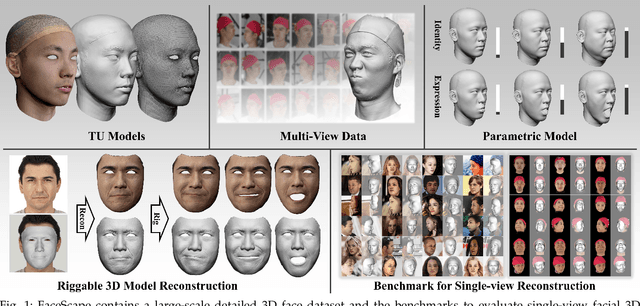
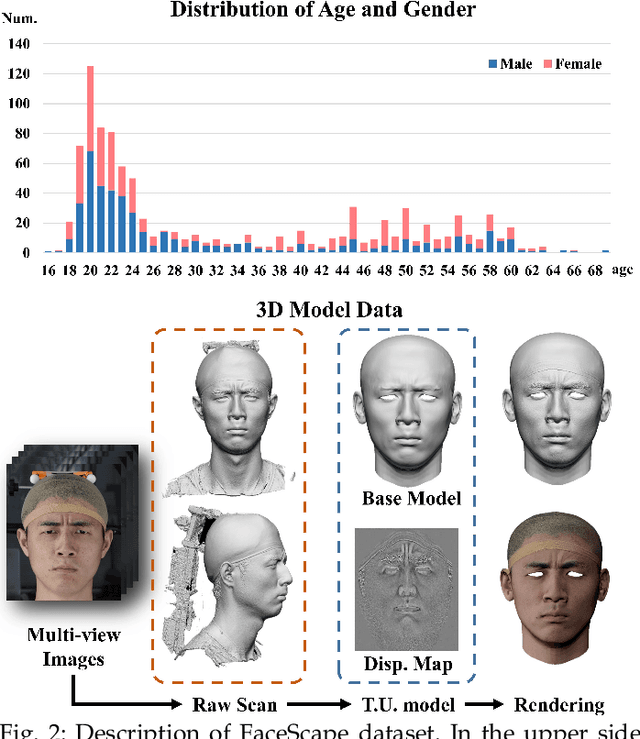
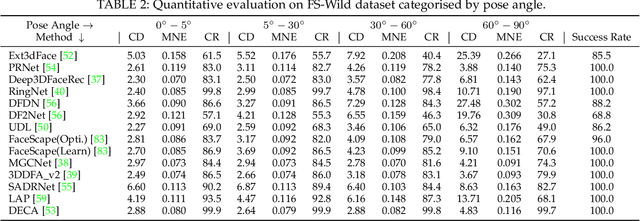
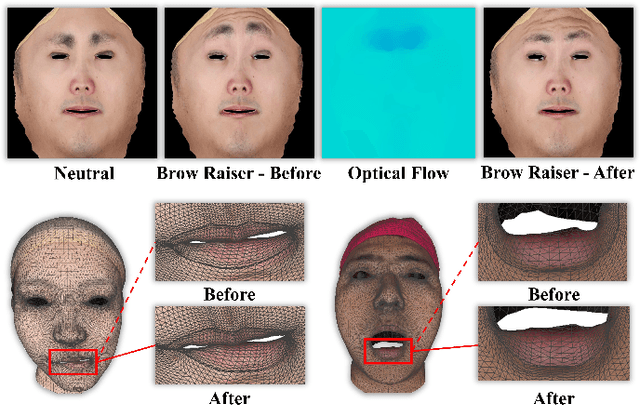
In this paper, we present a large-scale detailed 3D face dataset, FaceScape, and the corresponding benchmark to evaluate single-view facial 3D reconstruction. By training on FaceScape data, a novel algorithm is proposed to predict elaborate riggable 3D face models from a single image input. FaceScape dataset provides 18,760 textured 3D faces, captured from 938 subjects and each with 20 specific expressions. The 3D models contain the pore-level facial geometry that is also processed to be topologically uniformed. These fine 3D facial models can be represented as a 3D morphable model for rough shapes and displacement maps for detailed geometry. Taking advantage of the large-scale and high-accuracy dataset, a novel algorithm is further proposed to learn the expression-specific dynamic details using a deep neural network. The learned relationship serves as the foundation of our 3D face prediction system from a single image input. Different than the previous methods, our predicted 3D models are riggable with highly detailed geometry under different expressions. We also use FaceScape data to generate the in-the-wild and in-the-lab benchmark to evaluate recent methods of single-view face reconstruction. The accuracy is reported and analyzed on the dimensions of camera pose and focal length, which provides a faithful and comprehensive evaluation and reveals new challenges. The unprecedented dataset, benchmark, and code have been released to the public for research purpose.