 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHetero$^2$Net: Heterophily-aware Representation Learning on Heterogenerous Graphs
Oct 18, 2023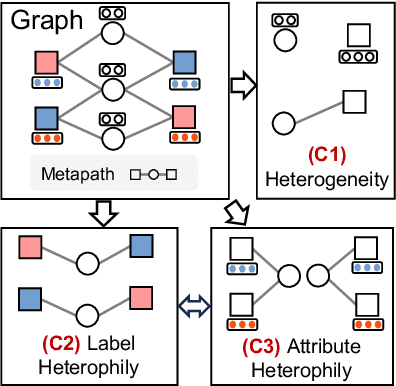
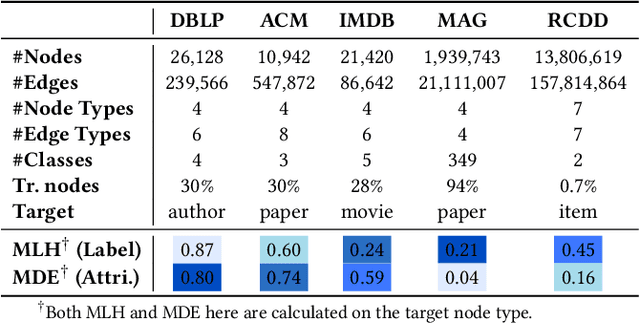
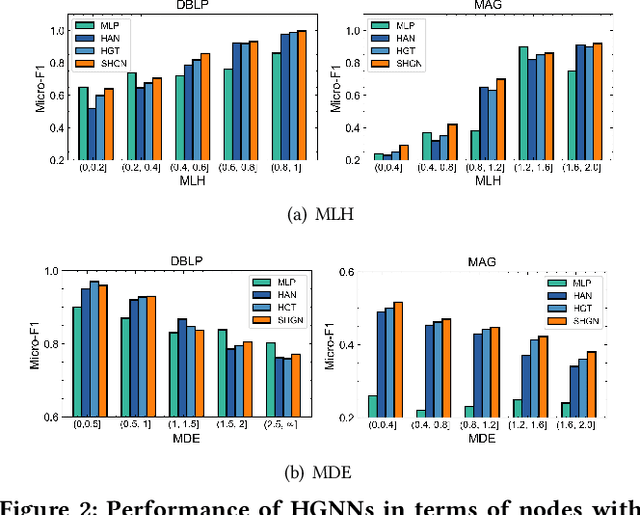
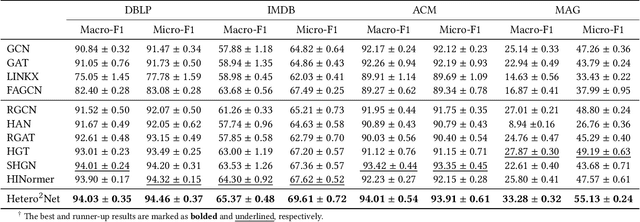
Real-world graphs are typically complex, exhibiting heterogeneity in the global structure, as well as strong heterophily within local neighborhoods. While a growing body of literature has revealed the limitations of common graph neural networks (GNNs) in handling homogeneous graphs with heterophily, little work has been conducted on investigating the heterophily properties in the context of heterogeneous graphs. To bridge this research gap, we identify the heterophily in heterogeneous graphs using metapaths and propose two practical metrics to quantitatively describe the levels of heterophily. Through in-depth investigations on several real-world heterogeneous graphs exhibiting varying levels of heterophily, we have observed that heterogeneous graph neural networks (HGNNs), which inherit many mechanisms from GNNs designed for homogeneous graphs, fail to generalize to heterogeneous graphs with heterophily or low level of homophily. To address the challenge, we present Hetero$^2$Net, a heterophily-aware HGNN that incorporates both masked metapath prediction and masked label prediction tasks to effectively and flexibly handle both homophilic and heterophilic heterogeneous graphs. We evaluate the performance of Hetero$^2$Net on five real-world heterogeneous graph benchmarks with varying levels of heterophily. The results demonstrate that Hetero$^2$Net outperforms strong baselines in the semi-supervised node classification task, providing valuable insights into effectively handling more complex heterogeneous graphs.
Image Processing in Optical Guidance for Autonomous Landing of Lunar Probe
Apr 24, 2008Because of the communication delay between earth and moon, the GNC technology of lunar probe is becoming more important than ever. Current navigation technology is not able to provide precise motion estimation for probe landing control system Computer vision offers a new approach to solve this problem. In this paper, author introduces an image process algorithm of computer vision navigation for autonomous landing of lunar probe. The purpose of the algorithm is to detect and track feature points which are factors of navigation. Firstly, fixation areas are detected as sub-images and matched. Secondly, feature points are extracted from sub-images and tracked. Computer simulation demonstrates the result of algorithm takes less computation and fulfils requests of navigation algorithm.
* Uploaded by ICIUS2007 Conference Organizer on behalf of the author(s). 5 pages, 8 figures