 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBit-Efficient Quantisation for Two-Channel Modulo-Sampling Systems
Jan 20, 2026Two-channel modulo analog-to-digital converters (ADCs) enable high-dynamic-range signal sensing at the Nyquist rate per channel, but existing designs quantise both channel outputs independently, incurring redundant bitrate costs. This paper proposes a bit-efficient quantisation scheme that exploits the integer-valued structure of inter-channel differences, transmitting one quantised channel output together with a compact difference index. We prove that this approach requires only 1-2 bits per signal sample overhead relative to conventional ADCs, despite operating with a much smaller per-channel dynamic range. Simulations confirm the theoretical error bounds and bitrate analysis, while hardware experiments demonstrate substantial bitrate savings compared with existing modulo sampling schemes, while maintaining comparable reconstruction accuracy. These results highlight a practical path towards high-resolution, bandwidth-efficient modulo ADCs for bitrate-constrained systems.
Difference-Based Recovery for Modulo Sampling: Tightened Bounds and Robustness Guarantees
Sep 16, 2025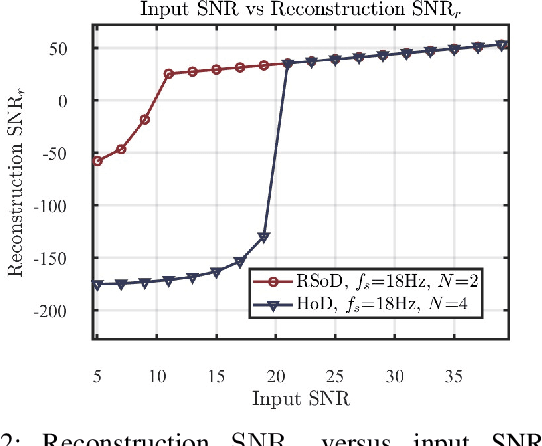
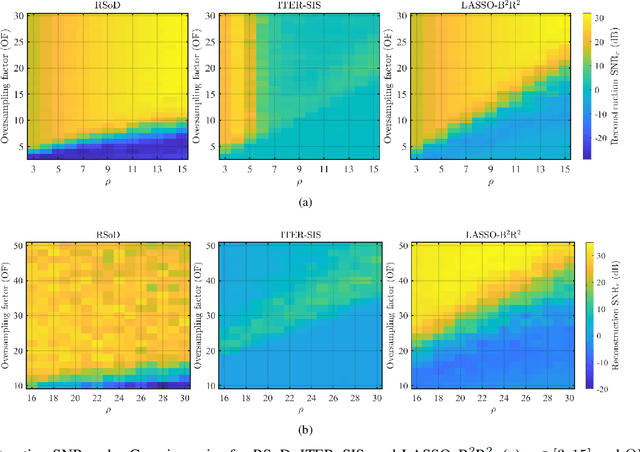
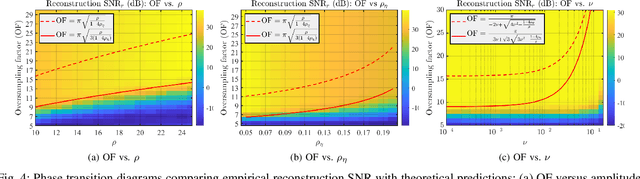
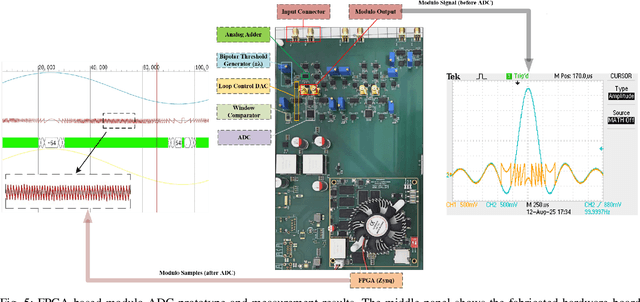
Conventional analog-to-digital converters (ADCs) clip when signals exceed their input range. Modulo (unlimited) sampling overcomes this limitation by folding the signal before digitization, but existing recovery methods are either computationally intensive or constrained by loose oversampling bounds that demand high sampling rates. In addition, none account for sampling jitter, which is unavoidable in practice. This paper revisits difference-based recovery and establishes new theoretical and practical guarantees. In the noiseless setting, we prove that arbitrarily high difference order reduces the sufficient oversampling factor from $2\pi e$ to $\pi$, substantially tightening classical bounds. For fixed order $N$, we derive a noise-aware sampling condition that guarantees stable recovery. For second-order difference-based recovery ($N=2$), we further extend the analysis to non-uniform sampling, proving robustness under bounded jitter. An FPGA-based hardware prototype demonstrates reliable reconstruction with amplitude expansion up to $\rho = 108$, confirming the feasibility of high-performance unlimited sensing with a simple and robust recovery pipeline.
Option Pricing Using Ensemble Learning
Jun 06, 2025Ensemble learning is characterized by flexibility, high precision, and refined structure. As a critical component within computational finance, option pricing with machine learning requires both high predictive accuracy and reduced structural complexity-features that align well with the inherent advantages of ensemble learning. This paper investigates the application of ensemble learning to option pricing, and conducts a comparative analysis with classical machine learning models to assess their performance in terms of accuracy, local feature extraction, and robustness to noise. A novel experimental strategy is introduced, leveraging parameter transfer across experiments to improve robustness and realism in financial simulations.Building upon this strategy, an evaluation mechanism is developed that incorporates a scoring strategy and a weighted evaluation strategy explicitly emphasizing the foundational role of financial theory. This mechanism embodies an orderly integration of theoretical finance and computational methods. In addition, the study examines the interaction between sliding window technique and noise, revealing nuanced patterns that suggest a potential connection relevant to ongoing research in machine learning and data science.
FALCON: Feedback-driven Adaptive Long/short-term memory reinforced Coding Optimization system
Oct 28, 2024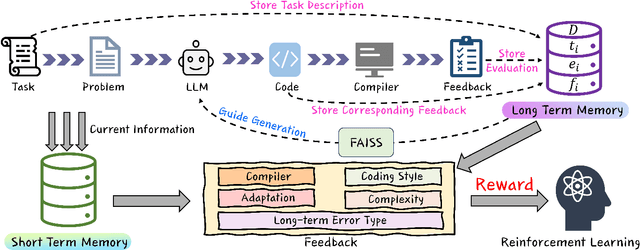
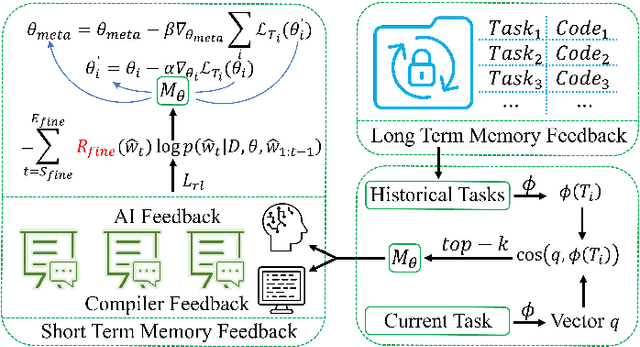
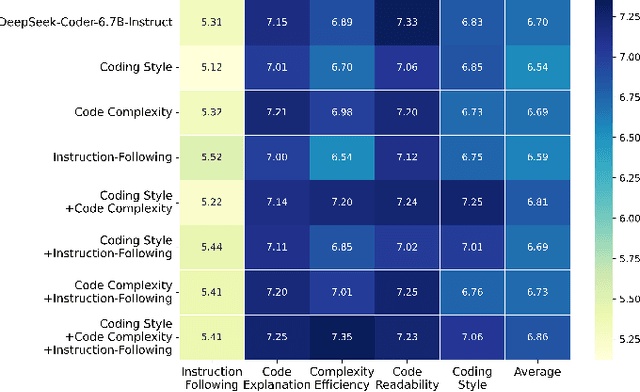
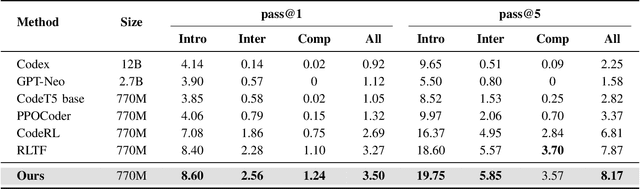
Recently, large language models (LLMs) have achieved significant progress in automated code generation. Despite their strong instruction-following capabilities, these models frequently struggled to align with user intent in coding scenarios. In particular, they were hampered by datasets that lacked diversity and failed to address specialized tasks or edge cases. Furthermore, challenges in supervised fine-tuning (SFT) and reinforcement learning from human feedback (RLHF) led to failures in generating precise, human-intent-aligned code. To tackle these challenges and improve the code generation performance for automated programming systems, we propose Feedback-driven Adaptive Long/short-term memory reinforced Coding Optimization (i.e., FALCON). FALCON is structured into two hierarchical levels. From the global level, long-term memory improves code quality by retaining and applying learned knowledge. At the local level, short-term memory allows for the incorporation of immediate feedback from compilers and AI systems. Additionally, we introduce meta-reinforcement learning with feedback rewards to solve the global-local bi-level optimization problem and enhance the model's adaptability across diverse code generation tasks. Extensive experiments demonstrate that our technique achieves state-of-the-art performance, leading other reinforcement learning methods by more than 4.5 percentage points on the MBPP benchmark and 6.1 percentage points on the Humaneval benchmark. The open-sourced code is publicly available at https://github.com/titurte/FALCON.
Structure-Preserving Transformers for Learning Parametrized Hamiltonian Systems
Dec 18, 2023



Two of the many trends in neural network research of the past few years have been (i) the learning of dynamical systems, especially with recurrent neural networks such as long short-term memory networks (LSTMs) and (ii) the introduction of transformer neural networks for natural language processing (NLP) tasks. Both of these trends have created enormous amounts of traction, particularly the second one: transformer networks now dominate the field of NLP. Even though some work has been performed on the intersection of these two trends, this work was largely limited to using the vanilla transformer directly without adjusting its architecture for the setting of a physical system. In this work we use a transformer-inspired neural network to learn a complicated non-linear dynamical system and furthermore (for the first time) imbue it with structure-preserving properties to improve long-term stability. This is shown to be extremely important when applying the neural network to real world applications.