 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCost Minimization for Space-Air-Ground Integrated Multi-Access Edge Computing Systems
Oct 24, 2025Space-air-ground integrated multi-access edge computing (SAGIN-MEC) provides a promising solution for the rapidly developing low-altitude economy (LAE) to deliver flexible and wide-area computing services. However, fully realizing the potential of SAGIN-MEC in the LAE presents significant challenges, including coordinating decisions across heterogeneous nodes with different roles, modeling complex factors such as mobility and network variability, and handling real-time decision-making under partially observable environment with hybrid variables. To address these challenges, we first present a hierarchical SAGIN-MEC architecture that enables the coordination between user devices (UDs), uncrewed aerial vehicles (UAVs), and satellites. Then, we formulate a UD cost minimization optimization problem (UCMOP) to minimize the UD cost by jointly optimizing the task offloading ratio, UAV trajectory planning, computing resource allocation, and UD association. We show that the UCMOP is an NP-hard problem. To overcome this challenge, we propose a multi-agent deep deterministic policy gradient (MADDPG)-convex optimization and coalitional game (MADDPG-COCG) algorithm. Specifically, we employ the MADDPG algorithm to optimize the continuous temporal decisions for heterogeneous nodes in the partially observable SAGIN-MEC system. Moreover, we propose a convex optimization and coalitional game (COCG) method to enhance the conventional MADDPG by deterministically handling the hybrid and varying-dimensional decisions. Simulation results demonstrate that the proposed MADDPG-COCG algorithm significantly enhances the user-centric performances in terms of the aggregated UD cost, task completion delay, and UD energy consumption, with a slight increase in UAV energy consumption, compared to the benchmark algorithms. Moreover, the MADDPG-COCG algorithm shows superior convergence stability and scalability.
LLM-guided DRL for Multi-tier LEO Satellite Networks with Hybrid FSO/RF Links
May 17, 2025



Despite significant advancements in terrestrial networks, inherent limitations persist in providing reliable coverage to remote areas and maintaining resilience during natural disasters. Multi-tier networks with low Earth orbit (LEO) satellites and high-altitude platforms (HAPs) offer promising solutions, but face challenges from high mobility and dynamic channel conditions that cause unstable connections and frequent handovers. In this paper, we design a three-tier network architecture that integrates LEO satellites, HAPs, and ground terminals with hybrid free-space optical (FSO) and radio frequency (RF) links to maximize coverage while maintaining connectivity reliability. This hybrid approach leverages the high bandwidth of FSO for satellite-to-HAP links and the weather resilience of RF for HAP-to-ground links. We formulate a joint optimization problem to simultaneously balance downlink transmission rate and handover frequency by optimizing network configuration and satellite handover decisions. The problem is highly dynamic and non-convex with time-coupled constraints. To address these challenges, we propose a novel large language model (LLM)-guided truncated quantile critics algorithm with dynamic action masking (LTQC-DAM) that utilizes dynamic action masking to eliminate unnecessary exploration and employs LLMs to adaptively tune hyperparameters. Simulation results demonstrate that the proposed LTQC-DAM algorithm outperforms baseline algorithms in terms of convergence, downlink transmission rate, and handover frequency. We also reveal that compared to other state-of-the-art LLMs, DeepSeek delivers the best performance through gradual, contextually-aware parameter adjustments.
AoI-Sensitive Data Forwarding with Distributed Beamforming in UAV-Assisted IoT
Feb 13, 2025This paper proposes a UAV-assisted forwarding system based on distributed beamforming to enhance age of information (AoI) in Internet of Things (IoT). Specifically, UAVs collect and relay data between sensor nodes (SNs) and the remote base station (BS). However, flight delays increase the AoI and degrade the network performance. To mitigate this, we adopt distributed beamforming to extend the communication range, reduce the flight frequency and ensure the continuous data relay and efficient energy utilization. Then, we formulate an optimization problem to minimize AoI and UAV energy consumption, by jointly optimizing the UAV trajectories and communication schedules. The problem is non-convex and with high dynamic, and thus we propose a deep reinforcement learning (DRL)-based algorithm to solve the problem, thereby enhancing the stability and accelerate convergence speed. Simulation results show that the proposed algorithm effectively addresses the problem and outperforms other benchmark algorithms.
UAV-assisted Joint Mobile Edge Computing and Data Collection via Matching-enabled Deep Reinforcement Learning
Feb 11, 2025Unmanned aerial vehicle (UAV)-assisted mobile edge computing (MEC) and data collection (DC) have been popular research issues. Different from existing works that consider MEC and DC scenarios separately, this paper investigates a multi-UAV-assisted joint MEC-DC system. Specifically, we formulate a joint optimization problem to minimize the MEC latency and maximize the collected data volume. This problem can be classified as a non-convex mixed integer programming problem that exhibits long-term optimization and dynamics. Thus, we propose a deep reinforcement learning-based approach that jointly optimizes the UAV movement, user transmit power, and user association in real time to solve the problem efficiently. Specifically, we reformulate the optimization problem into an action space-reduced Markov decision process (MDP) and optimize the user association by using a two-phase matching-based association (TMA) strategy. Subsequently, we propose a soft actor-critic (SAC)-based approach that integrates the proposed TMA strategy (SAC-TMA) to solve the formulated joint optimization problem collaboratively. Simulation results demonstrate that the proposed SAC-TMA is able to coordinate the two subsystems and can effectively reduce the system latency and improve the data collection volume compared with other benchmark algorithms.
Task Delay and Energy Consumption Minimization for Low-altitude MEC via Evolutionary Multi-objective Deep Reinforcement Learning
Jan 11, 2025


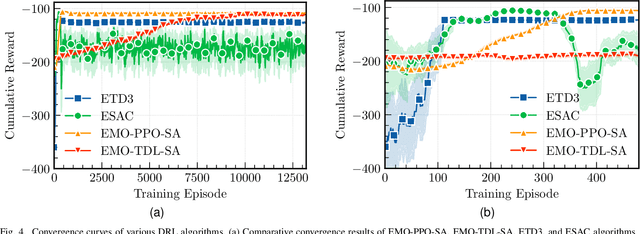
The low-altitude economy (LAE), driven by unmanned aerial vehicles (UAVs) and other aircraft, has revolutionized fields such as transportation, agriculture, and environmental monitoring. In the upcoming six-generation (6G) era, UAV-assisted mobile edge computing (MEC) is particularly crucial in challenging environments such as mountainous or disaster-stricken areas. The computation task offloading problem is one of the key issues in UAV-assisted MEC, primarily addressing the trade-off between minimizing the task delay and the energy consumption of the UAV. In this paper, we consider a UAV-assisted MEC system where the UAV carries the edge servers to facilitate task offloading for ground devices (GDs), and formulate a calculation delay and energy consumption multi-objective optimization problem (CDECMOP) to simultaneously improve the performance and reduce the cost of the system. Then, by modeling the formulated problem as a multi-objective Markov decision process (MOMDP), we propose a multi-objective deep reinforcement learning (DRL) algorithm within an evolutionary framework to dynamically adjust the weights and obtain non-dominated policies. Moreover, to ensure stable convergence and improve performance, we incorporate a target distribution learning (TDL) algorithm. Simulation results demonstrate that the proposed algorithm can better balance multiple optimization objectives and obtain superior non-dominated solutions compared to other methods.
Online Collaborative Resource Allocation and Task Offloading for Multi-access Edge Computing
Jan 06, 2025



Multi-access edge computing (MEC) is emerging as a promising paradigm to provide flexible computing services close to user devices (UDs). However, meeting the computation-hungry and delay-sensitive demands of UDs faces several challenges, including the resource constraints of MEC servers, inherent dynamic and complex features in the MEC system, and difficulty in dealing with the time-coupled and decision-coupled optimization. In this work, we first present an edge-cloud collaborative MEC architecture, where the MEC servers and cloud collaboratively provide offloading services for UDs. Moreover, we formulate an energy-efficient and delay-aware optimization problem (EEDAOP) to minimize the energy consumption of UDs under the constraints of task deadlines and long-term queuing delays. Since the problem is proved to be non-convex mixed integer nonlinear programming (MINLP), we propose an online joint communication resource allocation and task offloading approach (OJCTA). Specifically, we transform EEDAOP into a real-time optimization problem by employing the Lyapunov optimization framework. Then, to solve the real-time optimization problem, we propose a communication resource allocation and task offloading optimization method by employing the Tammer decomposition mechanism, convex optimization method, bilateral matching mechanism, and dependent rounding method. Simulation results demonstrate that the proposed OJCTA can achieve superior system performance compared to the benchmark approaches.
BARGAIN-MATCH: A Game Theoretical Approach for Resource Allocation and Task Offloading in Vehicular Edge Computing Networks
Mar 26, 2022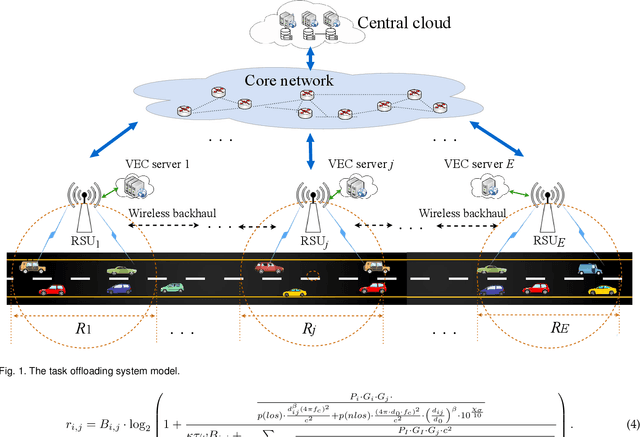
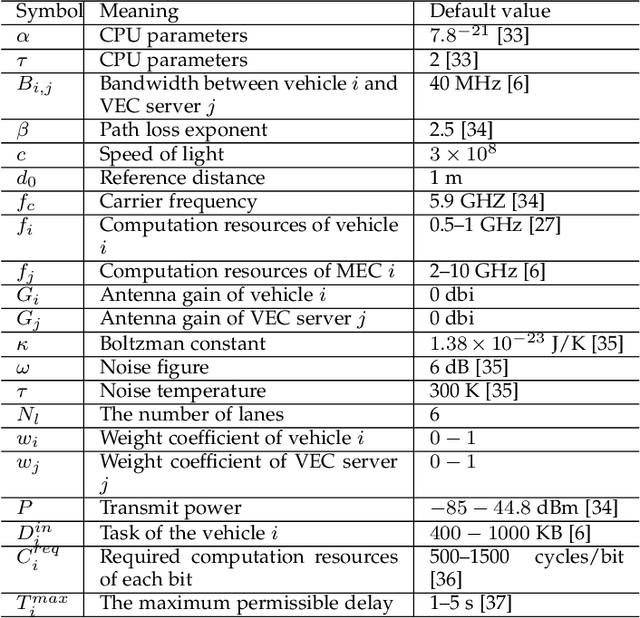
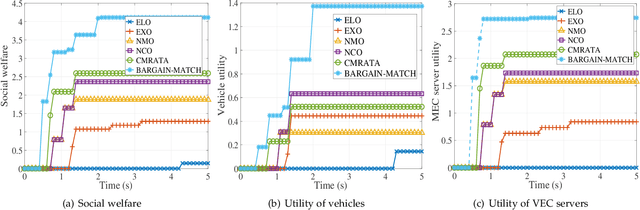
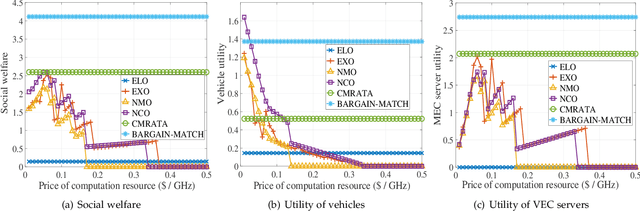
Vehicular edge computing (VEC) is emerging as a promising architecture of vehicular networks (VNs) by deploying the cloud computing resources at the edge of the VNs. This work aims to optimize resource allocation and task offloading in VEC networks. Specifically, we formulate a game theoretical resource allocation and task offloading problem (GTRATOP) that aims to maximize the system performance by jointly considering the incentive for cooperation, competition among vehicles, heterogeneity between VEC servers and vehicles, and inherent dynamic of VNs. Since the formulated GTRATOP is NP-hard, we propose an adaptive approach for resource allocation and task offloading in VEC networks by incorporating bargaining game and matching game, which is called BARGAIN-MATCH. First, for resource allocation, a bargaining game-based incentive is proposed to stimulate the vehicles and VEC servers to negotiate the optimal resource allocation and pricing decisions. Second, for task offloading, a many-to-one matching scheme is proposed to decide the optimal offloading strategies. Third, the dynamic and time-varying features are considered to adapt the strategies of BARGAIN-MATCH to the real-time VEC networks. Moreover, the BARGAIN-MATCH is proved to be stable and weak Pareto optimal. Simulation results demonstrate that the proposed BARGAIN-MATCH achieves superior system performance and efficiency compared to other methods, especially when the system workload is heavy.